#electric motor design
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
There are dozens of funny blogs to kill time on Tumblr.
Text
Electric Motor Design/Simulation - SimuTech Group
The page from SimuTech Group details their Electric Motor Design/Simulation services, which focus on providing advanced simulation and consulting for electric machines. They offer expertise in designing, analyzing, and optimizing electric motors to improve performance and efficiency. Their services utilize state-of-the-art simulation tools to model and predict motor behavior, helping clients address challenges in electric motor design and integration. SimuTech Group aims to deliver innovative solutions and insights that enhance the functionality and reliability of electric machines.
0 notes
Text






Renault R17 Electric Restomod x Ora Ito, 2024. A restomod 1970s R17 coupé that has been given a 270bhp electric drivetrain related to the e-PT-200kW which will power future electric Renaults. The new power source drives the car's rear wheels as opposed to the front drive of the combustion engine original. The concept has been created in partnership with French designer Ora Ito and will be presented at the Paris Motor Show in October
#Renault#Renault R17#Renault R17 Concept#Renault R17 EV#Renault R17 Electric Restomod x Ora Ito#restomod#Ora Ito#concept#prototype#1970s style#2024#Paris Motor Show#design study#electric car#rear wheel drive
488 notes
·
View notes
Text

#design#fashion#car#car detailing#car design#cars#classic cars#beauty#beautiful#beautiful car#beautiful cars#classical cars#automotive#automobile#classic automobiles#classic#beautiful automobile#motor#color design#aesthetic#car aesthetic#automobile aesthetic#car fun#unusual vehicles#vehicle wraps#automative#automotive art#automotive accessories#electric vehicles#Nichole aesthetic
153 notes
·
View notes
Text



Shell and insides
#motorcycle#design#ares#electric#cyberpunk#livery#racing#real motors#sport bike#white#shell#technology
44 notes
·
View notes
Text

#motorbike#motors#motorrad#motorcycle#motorlu panjur#honda#vehicle#electric cars#car#lexus#motorcyclelove#fast and furious#fast gif#fast heartbeat#beatiful#wonderful#amazing#gorgeous#design#creative#designer#geometric#my photos#photograph#i sell photos#beautiful photos#picture#photoshop#photoshoot
35 notes
·
View notes
Text
Idk. it's all fun and games until the price check on a project comes out to over 1 grand.
#RIP.#i was going to make my wheel chair electric but Nope.#the actual chair itself will be piss cheap to make. The tires are the most expensive part.#but batteries and motors that are built for this kind of application are Not Cheap#anyways........... i might run a funding goal eventually. ill design the chair with space for the e-parts sp itll still work as a manual#until i can afford them.#Turns out e-chairs are Expensive for a reason
7 notes
·
View notes
Text

#photography#aesthetic#car#cloud#sky#land vehicle#vehicle#wheel#tire#automotive lighting#hood#infrastructure#motor vehicle#automotive tire#electricity#automotive design#overhead power line#asphalt#bumper#automotive exterior#parking#morning#mountain#road#mountainous land forms#vehicle door#rolling#windscreen wiper#city#windshield
2 notes
·
View notes
Text
Exploring the Exciting World of DYU E-Bikes!
The e-bike industry is booming, and DYU is leading the charge with its innovative designs and eco-friendly solutions. If you're considering a compact option, you should definitely look into foldable mini e-bikes!
These foldable mini e-bikes are perfect for urban commuting, allowing you to navigate busy streets with ease while also being able to store them conveniently when not in use. DYU offers a range of models that combine style, functionality, and sustainability.
With their lightweight frames and powerful electric motors, DYU e-bikes provide a smooth and enjoyable ride. Plus, they are designed with user comfort in mind, making them suitable for riders of all ages.
So if you're in the market for an efficient and fun way to get around, consider investing in a DYU foldable mini e-bike. It's a fantastic choice for both your lifestyle and the environment!
0 notes
Text
Exploring the World of Ladies Electric Bikes with DYU
Hello everyone! I'm excited to share my thoughts on the wonderful world of ladies electric bikes, especially focusing on the impressive brand DYU. If you're looking for a stylish and efficient way to get around, DYU has some fantastic options tailored specifically for women.
The ladies electric bike from DYU combines elegance with functionality, making it perfect for commuting, running errands, or simply enjoying a leisurely ride. With its lightweight design and powerful electric motor, these bikes make cycling accessible and enjoyable for everyone.
One of the standout features of DYU's ladies electric bikes is their sleek design, which doesn’t compromise on comfort or performance. They come with adjustable seats and handlebars, ensuring a perfect fit for riders of all heights. Plus, the eco-friendly aspect of electric biking means you're contributing positively to the environment while enjoying your ride.
I would love to hear from other bike enthusiasts about their experiences with DYU or any recommendations for ladies electric bikes. Let's celebrate the joy of cycling together!
#lightweight design#electric motor#efficient#ladies electric bikes#commuting#eco-friendly#comfort#bike enthusiasts
0 notes
Text
Exploring the Benefits of DYU's Electric Foldable Bike
Hey everyone! I'm really excited to share my thoughts on the electric foldable bike industry, especially focusing on the amazing brand DYU.
As someone who's been looking for a convenient and eco-friendly mode of transportation, I discovered DYU's electric foldable bikes and was instantly impressed. These bikes are not just stylish, but they're also incredibly practical for urban commuting. The ability to fold them up makes it easy to store them in small spaces or take them on public transport.
One of the standout features of DYU's electric foldable bikes is their powerful battery and motor, providing a smooth ride while allowing you to tackle hills with ease. Plus, with their sleek design and range of colors, you can ride in style!
If you're considering making the switch to an electric foldable bike, I highly recommend checking out DYU. They offer a fantastic blend of performance, portability, and affordability. Happy riding!
0 notes
Text
Exploring the Exciting World of E-Bikes: DYU's Innovations
If you're looking for electric bikes, DYU is a brand that stands out for its quality and innovation. Their range of e-bikes offers something for everyone, whether you're commuting in the city or enjoying a weekend ride in the countryside.
DYU combines cutting-edge technology with stylish design, making their e-bikes not only functional but also visually appealing. The brand is committed to providing an exceptional riding experience, ensuring that each bike is equipped with powerful batteries and efficient motors that can handle various terrains.
Are there any online stores or local dealers where you can purchase DYU e-bikes? Many reputable websites offer a variety of models, and you can often find great deals. Additionally, visiting local bike shops can give you the chance to test ride the bikes and receive expert advice.
Investing in a DYU e-bike means embracing a sustainable mode of transportation that promotes a healthier lifestyle while reducing your carbon footprint. With the growing popularity of e-bikes, now is the perfect time to explore what DYU has to offer!
#carbon footprint#electric bikes#commuting#motor efficiency#stylish design#local dealers#battery technology#healthy lifestyle
0 notes
Text
Exploring the Exciting World of E-Bikes: DYU's Foldable Electric Bicycle
The e-bike industry is booming, and one brand that stands out is DYU. Known for their innovative designs, DYU has made a name for itself in the foldable electric bicycle market. These bikes are not only stylish but also incredibly practical for urban commuting and leisure riding.
With a focus on convenience, DYU's foldable electric bicycles are perfect for those who need to save space at home or on public transport. Their lightweight design allows for easy carrying and storage, making them an ideal choice for city dwellers.
Moreover, DYU bikes are equipped with powerful batteries and efficient motors, ensuring a smooth and enjoyable ride. Whether you’re navigating through traffic or enjoying a leisurely weekend ride, DYU's foldable electric bicycles provide the perfect blend of functionality and fun.
Join the e-bike revolution with DYU and experience the freedom of sustainable transportation!
0 notes
Text

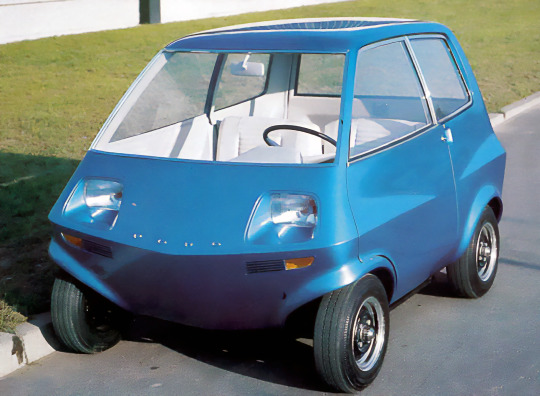


Ford Berliner Concept, 1968. An electric city car prototype created by designers at Ford of Europe and first presented at Ford of Europe in Cologne before appearing at the 1969 Geneva Motor Show. Although it was only 2.13 metres long it could seat 2 adults and 2 children, the batteries were stored under the seats.
#Ford#Ford Berliner#1968#concept#prototype#design study#Ford of Europe#microcar#city car#electric city car#EV#electric car#Geneva Motor Show
1K notes
·
View notes
Text
Exploring the Exciting World of Electric Folding Bikes
The e-bike industry is rapidly evolving, and one brand that stands out in the electric folding bike market is DYU. Their innovative designs and commitment to quality make them a top choice for those looking to enjoy the benefits of cycling without the hassle of traditional bikes.With DYU electric folding bikes, riders can experience the joy of cycling while also benefiting from the convenience of portability. These bikes are perfect for urban commuting, allowing users to easily fold them and take them on public transport or store them in small spaces.The lightweight design and powerful electric motor of DYU bikes enhance the riding experience, making it enjoyable and effortless. Whether you’re navigating city streets or exploring scenic routes, DYU has a model to suit your needs.Moreover, the eco-friendly aspect of electric bikes contributes to a greener planet, as they produce zero emissions. This makes choosing a DYU electric folding bike not only a great personal decision but also a responsible one for the environment.In conclusion, if you're looking for a reliable electric folding bike, DYU is an excellent choice that combines style, functionality, and sustainability. Embrace the future of commuting with a DYU e-bike!
#eco-friendly#zero emissions#sustainability#electric motor#innovation#urban commuting#lightweight design
0 notes
Text
Discovering the Best Budget Electric Bike: DYU's Amazing Offerings!
The e-bike industry is booming, and DYU is making waves as one of the top contenders in the market. If you’re on the lookout for budget electric bikes, DYU has some fantastic options that cater to both your wallet and your riding needs.
DYU bikes are designed with affordability in mind, without compromising on quality or performance. Whether you’re commuting to work or enjoying a leisurely ride around the neighborhood, DYU offers a range of models that are perfect for any lifestyle.
One of the standout features of DYU e-bikes is their lightweight design, making them easy to handle and maneuver. Plus, their impressive battery life ensures you can travel further without worrying about running out of power.
Not only are DYU bikes budget-friendly, but they also come equipped with modern technology, such as smart displays and efficient motors, enhancing your riding experience.
If you’re searching for a reliable and cost-effective way to explore the world of electric bikes, DYU is definitely worth considering. Embrace the joy of cycling with DYU and discover the perfect blend of affordability and performance!
#budget electric bike#DYU#e-bike#affordability#quality#performance#lightweight design#battery life#modern technology#smart displays#efficient motors#commuting#leisurely ride
0 notes
Text
Exploring the Exciting World of E-Bikes
Hello everyone! Today, I want to share my enthusiasm for the e-bike industry, particularly focusing on the innovative brand DYU. E-bikes have become a fantastic way to combine convenience and sustainability, and they are transforming how we think about transportation.
So, how does an e-bike work? E-bikes, or electric bicycles, are equipped with a battery-powered motor that assists the rider while pedaling. This means that even if you're navigating hilly terrain or commuting long distances, you can enjoy a smooth ride without excessive effort. DYU has made significant strides in this field, offering models that are lightweight, stylish, and packed with features that enhance the riding experience.
One of the standout features of DYU e-bikes is their user-friendly design. They often come with smart technology, such as LCD screens that display speed, battery life, and distance traveled, making it easy to track your journey. Additionally, the batteries are removable, allowing for convenient charging at home or the office.
The e-bike movement is not just about getting from point A to point B; it's about embracing a lifestyle that values health, environment, and fun. With DYU, you're not only investing in a mode of transport but also joining a community of like-minded individuals who appreciate the freedom and joy that e-bikes bring.
I'm excited to see where the e-bike industry goes next, and I encourage everyone to consider trying an e-bike for themselves. It’s a fantastic way to explore your surroundings while staying active and reducing your carbon footprint. Cheers to new adventures on two wheels!
#e-bikes#electric bicycles#DYU#sustainable transportation#innovation#battery-powered motor#commuting#user-friendly design#smart technology#LCD screens#removable batteries#health#environment#lifestyle#community#carbon footprint#active transportation#adventure
1 note
·
View note