#eMobilityControls
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Women make up for the other 50% of Tumblr’s audience.
Text
Introduction To Emobility Controls
Introduction

Electric mobility, or eMobility, a more sustainable and environmentally friendly alternative to traditional fossil fuel-powered cars, is causing a seismic upheaval in the global transportation sector. An inventive and intricate collection of systems called eMobility controls is at the center of this change. These systems cover a broad spectrum of innovations and technologies that are essential to the maintenance, adjustment, and control of electric vehicles (EVs) and the related infrastructure for charging them.
This thorough examination of eMobility controls reveals their elements, importance, and ability to completely transform the transportation industry.
Understanding eMobility Controls
A complex system of hardware and software known as eMobility controls regulates many facets of electric cars, charging stations, and how they interact with one another. These systems act as the invisible architects of a cohesive, efficient, and sustainable eMobility ecosystem. eMobility controls, which regulate everything from battery performance to safe and intelligent charging, are at the forefront of innovation in the transportation industry.
Components of eMobility Controls

Vehicle Management System (VMS): The Vehicle Management System (VMS), sometimes known as the brain of an electric car, monitors and regulates a variety of operations, such as:
Battery management preserves the battery's health while guaranteeing ideal charging and discharging.
Power distribution: effectively distributes energy to different parts, such as motors and auxiliary systems.
Energy Recovery: Controls the recovery and storage of energy through regenerative braking.
Critical components run within a safe temperature range thanks to thermal management.
General Vehicle Performance: Adjusts parameters to maximize driving range and energy economy.
Charging Infrastructure Control
A dependable infrastructure for charging EVs is necessary for their success. Charging station eMobility controllers manage:
Power Distribution: Controls the electricity flow to guarantee effective charging.
Voltage management: prevents overloading or undercharging by maintaining ideal charging levels.
Grid connectivity guarantees a smooth connection to the electrical grid.
By enabling intelligent charging, load balancing, and demand response management, these controls lessen grid stress during times of high demand.
Communication Protocols
Different parts of the eMobility ecosystem need to communicate effectively with one another. Open Charge Point Protocol (OCPP) and ISO 15118 are two examples of standardized communication protocols that make it easier and safer for:
Electric automobiles
Stations for charging
Systems for managing energy
Intelligent grids
This interoperability guarantees a unified and integrated eMobility network.
Energy Management System (EMS)
The Energy Management System (EMS) optimizes electric vehicle energy distribution and consumption. The EMS determines the most effective energy use by analyzing driving behaviors, traffic patterns, and battery conditions. An increased driving range and better overall performance are the outcomes of this.
Battery Management System (BMS)

The BMS monitors and controls battery health and performance.
Important roles include:
Making sure charging and discharging are safe
Avoiding dangerous situations like overcharging or deep discharge
delivering up-to-date information on battery health, charge level, and temperature
To preserve battery longevity and guarantee vehicle safety, the BMS is essential.
Importance and Advantages of eMobility Controls
Increase in Efficiency
One of the key advantages of eMobility controllers is their energy economy. These controls increase EV driving range and reduce energy waste by intelligently controlling energy distribution, usage, and charging.
Better User Experience
The following features of eMobility controls greatly help drivers:
Remote vehicle diagnostics: This makes it possible to track the condition of your car in real-time.
Predictive Maintenance Alerts: By addressing possible problems early on, predictive maintenance alerts help to reduce unplanned breakdowns.
Personalized Energy-Saving Suggestions: Drivers can improve their driving habits and increase efficiency with the help of personalized energy-saving suggestions.
These characteristics improve the entire driving experience and make car ownership easier.
Grid Integration

Bidirectional energy transfer between EVs and the grid is made possible by eMobility controllers. Because of this integration, EVs can serve as mobile energy storage devices, supplying the grid with extra energy during periods of high demand or energy scarcity. This feature encourages economical energy use and improves grid stability.
Effects on the Environment
The following are some ways that eMobility controls support environmental sustainability:
Scheduling EV charging to coincide with times when renewable energy is most readily available
lowering transportation’s carbon footprint by incorporating renewable energy sources
Increased Security
Modern temperature control and battery management systems guarantee the secure operation of electric cars. These preventative measures safeguard the car and its occupants by avoiding problems like thermal runaway and overheating.
Innovations and Difficulties
Interoperability and Standardization
The absence of defined communication protocols is a problem as the eMobility ecosystem expands. For seamless integration, disparate systems created by different vendors and stakeholders must be compatible.
Cybersecurity Concerns
eMobility systems are susceptible to hacking and illegal access because of their growing connection. Maintaining system integrity and safeguarding sensitive data require strong cybersecurity measures.
Upcoming Developments
eMobility controls have a bright future thanks to developments like:
Advanced Driver Assistance Systems (ADAS): Increasing the efficiency and security of driving.
Allowing vehicle-to-grid (V2G) connectivity allows EVs to help stabilize the grid.
Autonomous electric cars: For smooth functioning, cars need advanced control systems.
To handle the complex interconnections between cars, charging infrastructure, and the electrical grid, these developments will require sophisticated control systems.
Conclusion
The unsung heroes of the electric vehicle revolution are eMobility controls. The smooth functioning of EVs, charging stations, and the larger energy infrastructure is made possible by these complex systems. A cleaner and smarter transportation future is being paved by eMobility controls, which improve efficiency, user experience, and environmental sustainability.
We should expect ever more advanced eMobility controls as technology advances. The next era of mobility will be defined by these developments, which will further integrate EVs with digital infrastructure, grid services, and renewable energy sources. The future of transportation will surely be shaped by the continuous innovation and development of these vital systems.
Investigate the Dorleco solutions propelling the future of sustainable mobility for the best VCU products, CAN Keypads, CANDisplays, and eMobility control services.
#emobilitycontrols#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Predictive Maintenance and eMobility Controls
July 25, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction

Predictive Maintenance:
Using data, advanced analytics, and machine learning, predictive maintenance is a proactive approach to equipment and machinery maintenance that foresees when repair is necessary before a failure occurs. It aims to minimize unplanned downtime, reduce maintenance costs, and optimize asset performance across a range of industries, including manufacturing, energy, transportation, and more.
Predictive maintenance’s essential elements include:
Data collection: Sensors, Internet of Things (IoT) devices, and other data sources capture real-time data about machinery and equipment, such as temperature, vibration, pressure, and usage trends.
Data analytics: To find patterns, anomalies, and potential problems in the gathered data, machine learning algorithms and advanced analytics technologies are employed. These algorithms can forecast when a piece of equipment will break or need maintenance.
Condition monitoring: By keeping a close eye on the equipment’s condition, maintenance personnel can spot problems early and take appropriate measures to prevent a breakdown.
Predictive alarms: Alerts and messages are sent out when analytics indicate that upkeep or repairs are necessary. These alerts can help with the prioritization and scheduling of maintenance tasks.
Maintenance Planning: By using forecasts and alerts, teams may schedule maintenance operations more efficiently, reducing downtime and avoiding costly emergency repairs.
Predictive maintenance advantages include:
Decreased Downtime: By resolving problems before they become failures, unexpected downtime is decreased. Improves maintenance schedules and lessens the need for needless planned maintenance. financial savings.
Extended Equipment Lifespan: Preventing problems before they get worse helps extend the life of equipment reduces the likelihood of device failure, improving safety.
Data-Driven Decision-Making: Makes data-driven decisions and resource allocation easier.
eMobility Controls:

In the realm of electric mobility, advanced electronic systems and software, also referred to as “eMobility controls,” oversee and regulate electric cars (EVs) and the infrastructure necessary for charging them. eMobility controls play a major role in the effective operation and pleasant user experience of electric cars and charging stations.
Important elements of eMobility controllers consist of:
Battery management involves keeping an eye on and controlling the battery’s health, temperature, and level of charge to get the most out of it and extend its life.
Infrastructure for managing the charging process, including grid integration, billing, and authentication, for fast chargers, home chargers, and public charging stations.
Energy Management: Energy management is the process of matching the grid’s capacity during periods of peak demand with the energy requirements of EVs.
Vehicle Control: Vehicle control refers to managing a vehicle’s torque and power distribution to improve efficiency, performance, and security.
User Interface: Using touchscreens or smartphone apps to provide drivers with simple interfaces to monitor and control charging, battery life, and other vehicle functions.
eMobility Controls Benefits:
Range optimization: Extends the driving range of electric cars through efficient energy management. Easy access to charging for electric vehicle owners is ensured by convenient charging.
Grid Integration: By incorporating EVs into the electrical system, grid stability is supported, and the overall carbon impact is reduced.

Savings: Reduces energy use and costs associated with charging for both car owners and chargers.
Environmental Benefits: Reduces greenhouse gas emissions by promoting the use of electric vehicles.
Predictive Maintenance Benefits:
Decreased Downtime: By foreseeing potential equipment problems before they arise, predictive maintenance helps to reduce unscheduled downtime. As a result, productivity and operational effectiveness increase.
Cost savings: By proactively addressing maintenance issues and avoiding emergency repairs, organizations can significantly reduce their maintenance expenses. Predictive maintenance optimizes maintenance schedules while reducing labor expenses and inventory of spare parts.
Extended Equipment Lifespan: Equipment and other assets can have their lives extended by timely maintenance and early problem detection. Consequently, companies may reap greater rewards from their financial investments.
Data-Driven Decision-Making: Predictive maintenance makes use of machine learning and data analytics to determine when and how to do maintenance. This data-driven approach results in the production of better plans. Because there are fewer unplanned breakdowns and more chances that the equipment will function when needed, equipment availability is raised and overall operational continuity is improved.
Improved Customer Satisfaction: In companies where downtime can affect customer services, predictive maintenance gives customers a more seamless and dependable experience.
Improved Resource Allocation: Maintenance teams can focus their resources more efficiently by focusing on the equipment that need maintenance the most, as opposed to following a standard plan for all assets.
Benefits of Electronic Mobility Controls:
Range Optimization: eMobility controls reduce “range anxiety” for drivers by enhancing energy efficiency and allowing electric vehicles (EVs) to travel farther between charges.
Convenient charging: With real-time status information, payment processing, and scheduling, the eMobility controls-managed charging infrastructure offers EV users a convenient and easy-to-use experience.
Grid Integration: Smart charging and load management for electric vehicles (EVs) are made possible by eMobility controllers, which facilitate the integration of EVs into the power grid. This balances energy consumption, lowers peak loads, and improves grid stability.
Savings: Compared to owners of traditional gasoline-powered cars, owners of electric vehicles can have lower running costs because of the lower cost of electricity and less maintenance requirements.
Environmental Benefits: Electric vehicles produce no exhaust emissions, which lowers air pollution and reduces their carbon footprint. This is made possible by contemporary eMobility technology.
Data insights: eMobility controls collect data on usage patterns, charging habits, and energy consumption. This information is then used by service providers and customers to optimize operations and make informed decisions.
Predictive maintenance’s drawbacks
Although predictive maintenance and eMobility controls offer numerous advantages, there may also be certain disadvantages and challenges. Some drawbacks of these technologies are as follows:
Cons of Predictive Maintenance:
Implementation Costs: Since deploying sensors, constructing a data gathering infrastructure, and developing predictive analytics skills are all necessary when putting up a predictive maintenance system, implementation costs might be substantial.
Data Availability and Accuracy: Timely and accurate data are necessary for predictive maintenance. Low data quality or limited data sources may make predictive maintenance less effective.
Training and Skill Requirements: For maintenance personnel to deploy predictive maintenance systems and correctly interpret the data, organizations must invest in their training and upskilling.
False Alarms: Predictive maintenance systems have the potential to generate erroneous forecasts or alerts, leading to unnecessary maintenance and related costs.
Integration challenges: It can be challenging to integrate predictive maintenance systems with existing equipment and practices, and it could be necessary to make significant changes to the way work is currently done.
Disadvantages of eMobility Controls:
Costs of Infrastructure: Infrastructure-related costs: Both the construction and upkeep of a public infrastructure and a fast-charging infrastructure for electric vehicles can be expensive.
Limited Infrastructure for Charging: In certain places, the scarcity of charging stations — especially fast chargers — may cause annoyances for electric vehicle (EV) owners.
Grid Load: In certain places, the quick uptake of EVs may impose undue strain on the grid, requiring costly adjustments to accommodate the growing demand.
Range Anxiety: Because certain electric vehicles have lesser ranges than cars with internal combustion engines, some drivers may still experience range anxiety even though eMobility features aid maximize energy use.
Limited Model Options: In certain markets, there may be fewer options for electric vehicle models than for conventional cars, which reduces buyer choice.
Energy Source: The environmental benefits of electric vehicles are influenced by the source of the electricity used for charging. If fossil fuels are used to create the electricity, the number of emissions that can be reduced could be limited.

Conclusion:
In conclusion, two revolutionary technologies that are changing how businesses manage assets, and the transportation sector functions are predictive maintenance and eMobility controls. While they both have a lot going for them, there are certain difficulties and things to keep in mind.
Utilizing data analytics and machine learning, predictive maintenance lowers downtime, saves money, and enhances safety by anticipating and averting equipment breakdowns. But in order to be successful, it needs competent staff and high-quality data, which can be expensive to deploy.
Future sustainable mobility and the shift to electric cars (EVs) depend heavily on eMobility controls. They provide advantages like lower operating costs and less environmental impact by optimizing range, charging convenience, and grid integration. However, there are still obstacles to overcome, such as the upfront cost of EVs, grid compatibility, and the expense of developing charging infrastructure.
Both technologies rely on advanced analytics and data to boost productivity, cut expenses, and boost overall performance. Additionally, they both aim to advance sustainability and lessen the environmental impact of transportation and industry.
The drawbacks of eMobility controls and predictive maintenance are anticipated to gradually lessen as governments, corporations, and consumers adopt these innovations and technology advances. In the end, these technologies are vital forces behind sustainability, efficiency, and safety, opening the door to a more intelligent, connected, and environmentally conscious future. When making choices about eMobility control systems and predictive maintenance, both individuals and organizations should weigh the advantages and disadvantages of these technologies.
#emobilitycontrols#predictivemaintenance#VCU#ProgrammableVCU#VCUSupplier#VCUServices#autonomousvehicle
0 notes
Text
Machine Learning And Advanced Driver Assistance Systems (ADAS)
June 5, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction

The automobile industry is changing dramatically as a result of the inclusion of cutting-edge technologies. Machine learning (ML) in conjunction with Advanced Driver Assistance Systems (ADAS) is one example of a technology that is improving traffic safety and redefining the future of transportation.
This essay investigates the mutually beneficial relationship between ML and ADAS, emphasizing their contributions to improving traffic safety, lowering accident rates, and laying the framework for self-driving vehicles.
1. Understanding machine learning (ML).
Artificial intelligence (AI) is a subset that enables computers to learn from data and patterns without the need for explicit programming. Computers can identify large datasets and extract important insights using machine learning methods. These insights can then be used to help make forecasts and decisions.
ML is employed in a variety of fields, including finance, healthcare, and e-commerce, but its impact on the automotive industry, notably in ADAS, has been transformative.
2. Advanced driver assistance systems (ADAS).

The word “ADAS” refers to a set of sophisticated tools and systems designed to aid drivers’ decision-making and improve overall traffic safety. These systems rely heavily on sensors, cameras, radars, and other data sources to perceive the environment and provide real-time feedback to the driver, as well as to function autonomously in some cases.
ADAS characteristics may include:
Adaptive Cruise Control (ACC): automatically adjusts the vehicle’s speed to keep a safe following distance from the vehicle in front of it.
Lane Departure Warning (LDW): Alerts the driver if the vehicle leaves its lane without turning on the turn signal.
Automatic Emergency Braking (AEB): AEB automatically applies the brakes to avoid or reduce collisions with other vehicles or pedestrians.
Blind Spot Monitoring (BSM): This technology warns the driver of items in the car’s blind spots.
Parking Assistance: Uses cameras and sensors to facilitate safe parking.
3. Machine Learning Benefits for ADAS
Machine learning plays an important role in improving ADAS capabilities by allowing systems to learn from data, adapt to new conditions, and make sound decisions. Here’s how ML improves ADAS capabilities.
Object Recognition and Tracking: Machine learning algorithms analyze sensor data to recognize and track things in real-time, such as moving cars, pedestrians, and barriers. Using this information, ADAS systems can intelligently decide whether to brake, steer, or undertake other safety procedures. Anomaly
Detection: ML models may detect unusual or unexpected driving patterns, such as rapid lane changes. These abnormalities may warn of future dangers, and ADAS can take proper precautions to avoid accidents.
Predictive Analytics: ML algorithms use historical data to predict potential risks and threats. ADAS can actively assist the driver and reduce accidents by anticipating potential hazards.
Adaptive Control: ML allows ADAS systems to change their settings in reaction to the driver’s behavior, traffic patterns, and environmental variables. This flexibility allows for a more personalized driving experience and increases the system’s performance.
Decision Making: ML algorithms enable ADAS to quickly review complex data and make decisions based on a wide range of variables, including traffic density, weather, and road conditions.

4. Applications of ML-Enabled ADAS:
Lane-Keeping Assistance: Using cameras and machine learning algorithms, ADAS can identify lane lines and give the car simple steering commands to maintain it in its lane.
Traffic Sign Recognition: ML helps ADAS identify and interpret traffic signs, including speed limits, stop signs, and no-entry signs, and alerts the driver when necessary using visual or audible signals.
Autonomous Emergency Braking (AEB): When a driver ignores a warning, machine learning algorithms analyze sensor data to identify probable accident risks and automatically apply the brakes.
Adaptive Headlights: ML-enabled ADAS can adjust the angle of the headlights according to the curve of the road and the volume of traffic, increasing visibility while reducing glare for other drivers.
Driver Monitoring: ML systems can monitor the driver’s behaviors and attention levels, detect signs of distraction or fatigue, and offer alerts or help prevent collisions.
5. Challenges and Opportunities for the Future
Despite the numerous benefits of ML-enabled ADAS, there are significant challenges that must be overcome before general acceptance and further development:
Data Quantity and Quality: To learn efficiently, ML models require a large amount of high-quality data. Gathering and annotating a diverse set of representative driving data may be a significant undertaking.
Robustness and Safety: To manage a wide range of environmental variables and scenarios, ML models must be both dependable and resilient. To gain the public’s trust, the ADAS’s safety and integrity must come first.
Regulatory and legal challenges: The combination of ML and ADAS raises numerous complex regulatory and legal challenges, including data protection and liability in the event of an accident.
Human-Machine Interaction: The challenge is to achieve smooth and natural interactions between drivers and machines as ADAS systems become more autonomous.

The future of ML with ADAS is quite bright. The creation of increasingly complicated ML models, as well as the rising availability of high-quality data, will result in more powerful ADAS functionalities and a safer driving experience. As ML models improve, we should expect to see further progress toward fully autonomous vehicles.
Conclusion
The automotive landscape is evolving as a result of the unbreakable collaboration between machine learning and advanced driver-aid systems. Driving becomes safer and more convenient thanks to ML-powered ADAS, which improves vehicle perception, decision-making abilities, and adaptive control.
Even though there are still challenges, the ongoing pursuit of innovation and collaboration among scientists, entrepreneurs, and decision-makers will bring us one step closer to a world in which highways are self-driving and accident-free. To ensure that ML-driven ADAS reaches its full potential as a game-changing force in the automotive industry, we must prioritize safety, ethics, and regulatory frameworks as we implement this technology.
Explore to learn more about machine learning (ML) in conjunction with Advanced Driver Assistance Systems (ADAS). Stay tuned for our new VCU products and services. For further details, you can email us at [email protected].
#ADAS#Autonomousdriving#Machinelearning#emobilitycontrols#Dorleco#VCUProducts#evse#ccu#VCUSupplier#Programablevcu
0 notes
Text
Error Detection And Correction In CAN
June 3, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
INTRODUCTION
Communication is vital in the ever-evolving world of automotive technology. Modern automobiles are outfitted with a variety of technical components that must work seamlessly together. One of the foundations of this communication is the Controller Area Network (CAN), a robust and dependable protocol that allows data to be sent across different components. However, mechanisms for error detection and correction in CAN are required to maintain this reliability. In this blog article, we will go extensively into the topic of error detection and repair in CAN, understanding how important these procedures are in ensuring the safety and dependability of modern vehicles.
The significance of CAN in contemporary automobiles
Before we go into error detection and correction in CAN, let’s look at how it works in modern automobiles.
What exactly does CAN stand for? The Controller Area Network, a robust serial communication protocol, enables vehicle electronic control units (VCUs) to connect. Why is it important? By allowing real-time data sharing between ECUs in charge of activities like as engine control, transmission management, and safety systems, CAN has emerged as the core of automotive communication.
1. The vulnerability of CAN.

Even though CAN is extremely reliable, errors can still occur. Several factors can result in communication mistakes, including:
Noise and interference: The electromagnetic interference created by multiple electrical components in the vehicle environment, which is noisy, can contaminate CAN signals. Defects in transceivers or other hardware components can cause CAN communication problems.
Electromagnetic Compatibility (EMC): Communication issues might arise when different ECUs and components are not compatible.
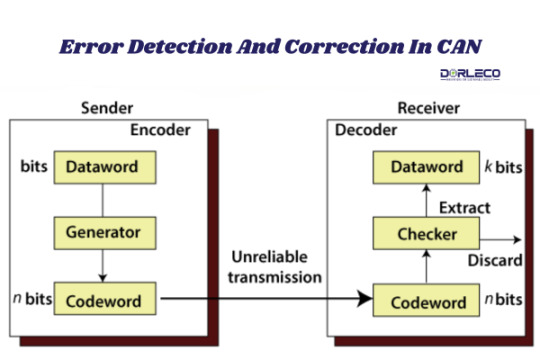
2. Basics of Error Detection in CAN
Various types of error detection CAN mechanisms are utilized to ensure dependability.
The Cyclic Redundancy Check (CRC) algorithm generates a checksum based on the transmitted data. To detect errors, the receiving node computes its CRC and compares it with the transmitted CRC.
The FCS field of the CAN frame, like the CRC, contains checksum information that is used to detect errors.
Bit Stuffing: You can use bit stuffing to ensure that the sender and receiver are in sync. The bit packing pattern may deviate, indicating an issue.
3. Error Correction in the Can
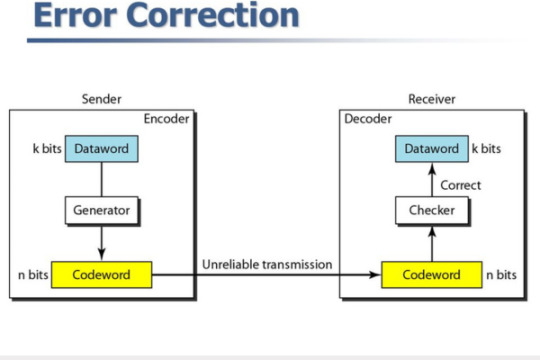
Error Detection in CAN is necessary, but it is not always sufficient. Error-correcting methods go one step further:
Retransmission: If an error is detected, the sender sends the message again. This ensures that the message is appropriately delivered to its intended recipient.
The CAN protocol includes an acknowledgment mechanism that allows the receiver to acknowledge that a message was properly received. If no acknowledgment is received, the sender retransmits, assuming an error.
4. Error Recovery and Handling.
It is critical to understand how to handle CAN faults and recover to assure system dependability.
Error Flags: CAN uses error flags to identify a variety of issues. These warning flags help you discover and fix problems. Error Passive and Error Active Modes: Depending on the number of errors detected, CAN nodes can switch between error passive and error active modes. This reduces the risk that errant nodes may disrupt the network as a whole.
5. Advanced Error-handling Strategies
Advanced error-handling mechanisms are occasionally utilized to ensure continuous communication.
Fault-Tolerant CAN (FTCAN) is a redundancy-based method that uses two CAN buses running concurrently to ensure that communication continues even if one bus fails. Flex Ray is a communication standard for automotive networks that improves error management; however, it is not a CAN protocol.
6. Security and Error Detection in CAN.
As linked and autonomous vehicles become more common, security concerns have grown. It is vital to understand how error detection relates to security.
Cyber security: To avoid unwanted access and manipulation, robust error detection in CAN and repair mechanisms are required. Malicious attacks on CAN networks are a possibility, emphasizing the need for these measures.
Intrusion Detection Systems: Advanced intrusion detection systems are being integrated into CAN networks to identify and respond to security threats.
7. Future Error Detection and Correction in CAN
The Future of Error Detection As vehicles get more intricate and networked, there are exciting improvements in CAN and CAN correction.
AI-based machine learning algorithms can help discover and rectify problems in real-time, as well as adjust to changing situations and threats.
Blockchain Technology: Researchers are looking into how blockchain may be used for tamper-proof and secure data collection and transfer.

Conclusion
The Heartbeat of Contemporary Vehicles
In conclusion, the Controller Area Network (CAN) is the unsung hero of modern automobiles because it enables critical electrical component communication. Error detection in CAN and corrective methods are unheralded heroes who fight behind the scenes to ensure that this communication is trustworthy, secure, and safe. The importance of effective error management in CAN will only grow as vehicles evolve and incorporate new technology. It’s critical to get from point A to point B safely, effectively, and with the confidence that all of your vehicle’s systems are working properly. This is made feasible by error detection in CAN and repair, which will remain critical to the industry’s future progress.
#CANKeypads#Autonomousdriving#Motorcontrolstrategies#emobilitycontrols#Dorleco#VCUProducts#Sensorfusion#Programablevcu
0 notes
Text
Can 2.0 and Can Fd: Controller Area Network
May 31, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction: Can 2.0 and Can FD.

The Controller Area Network (CAN) protocol has long been the standard method for exchanging data between electronic control units (ECUs) in automotive and industrial communication systems. This technology has evolved to meet the increasing demands of modern automobiles and industrial automation. The transition from CAN 2.0 (Controller Area Network 2.0) to CAN FD (CAN with Flexible Data Rate) is a watershed moment in this history.
In this blog post, we’ll look at the differences between CAN 2.0 and CAN FD, as well as the advantages they provide in terms of data speed, dependability, and adaptability. We will also investigate the causes that led to this decision.
1. Understanding CAN 2.0:
For many years, Controller Area Network 2.0, also known as Classical CAN, was the primary communication protocol used in the industrial and automotive sectors. CAN 2.0 was developed by Bosch in the 1980s to improve communication amongst vehicle ECUs. It was suited for scenarios requiring security and real-time data sharing since it provided a consistent and predictable communication channel.
2. Key Features of the CAN 2.0:

Fixed Data Rate: The fixed data rate of CAN 2.0 is undoubtedly its most significant disadvantage. It has a maximum speed of 1 Mbps, which was sufficient for early industrial and automotive applications but has subsequently become a bottleneck as data requirements have increased over time.
Message Length: CAN 2.0 allows a maximum message length of eight bytes per frame. While this was adequate for sharing simple data, as increasingly complex data, such as high-definition video and sensor data, needed to be conveyed, it became inadequate.
Deterministic and Reliable: One of the advantages of CAN 2.0 is its deterministic nature. Critical information always takes precedence since communications are sent in a precise order with priority. CAN 2.0 has error-checking tools to improve data dependability.
Why CAN FD Is Required: As technology advanced, the limitations of CAN 2.0 became increasingly obvious. The design of CAN FD was motivated by the need for higher data speeds, larger message payloads, and more adaptive communications.
Presenting CAN FD: The advent of CAN FD, or CAN with Flexible Data Rate, intended to address the shortcomings of CAN 2.0 while retaining its primary virtues of dependability and determinism. This new protocol represents significant progress in terms of data transport capabilities and applicability to modern applications.
3. Key Advantages of CAN-FD

Flexible Data Rates: The main advantage is already evident in the name: CAN FD offers flexible data rates. This means that it has a variety of working speeds, including a maximum data rate of 5 Mbps. The ever-increasing data requirements in today’s automobiles and industrial systems must be met, and adaptability is critical.
Extended Message Length: CAN FD allows for longer message payloads because frames can carry up to 64 bytes of data. This greater message length is required for sending complex data over the network, such as high-definition video.
Backward compatibility with CAN 2.0 is one of CAN FD’s brilliant design choices. This enables a smooth transition to the new protocol by allowing older ECUs that use CAN 2.0 to share the same network as newer CAN FD devices.
Increased Network Efficiency: By boosting data transmission rates and message sizes, CAN FD allows networks to be used more effectively, reducing latency and enhancing overall system performance.
4. Implementations of CAN-FD
The introduction of CAN FD has opened up new prospects in a variety of enterprises. Here are some examples of the impact this technology is having:
Can FD be a game changer in the auto industry? Modern automobiles contain a variety of sensors and electrical control units, all of which require a fast and reliable connection. Advanced driver assistance systems (ADAS) and autonomous driving features can send critical data thanks to CAN FD’s adjustable data rates and lengthy message lengths.
Commercial Automation: Can FD provide a dependable industrial automation solution where real-time data transfer is critical? Robots and manufacturing equipment can easily communicate, allowing for accurate control and monitoring of production processes. The protocol’s flexibility allows it to suit the diverse data needs of numerous industrial applications.
Aviation and Defense: Aerospace and defense applications require high levels of dependability and data integrity. CAN FD is an excellent choice for avionics and military systems because of its better error-checking methods and ability to handle large data payloads.
5. Challenges and Things to Consider
Even though CAN-FD has various advantages, there are some issues and factors to consider:
Cost: Updating hardware and software may be required for CAN FD deployment, which can be costly, particularly in industries with large installations.
Complexity: Because of CAN FD’s increased flexibility, network management may become more complicated. For optimal performance, adequate setup and monitoring are required.
Transition Period: For sectors that currently have CAN 2.0 networks in place, the transition to CAN FD may necessitate careful planning to avoid interruptions and ensure backward compatibility.
Conclusion:
Can FD become a crucial invention in the ever-changing realm of automotive and industrial communications? It addresses the drawbacks of its predecessor, CAN 2.0, by allowing for configurable data speeds, larger message durations, and enhanced error detection.
CAN FD’s adaptability and durability make it a critical technology for the future as data transfer demands in both automotive and industrial systems increase? Although the transition from Can 2.0 and Can Fd may be tough, the benefits in terms of speed, efficiency, and adaptability make the investment worthwhile for industries seeking to stay on the cutting edge of technology.
Get to know more about Can 2.0 and Can FD. Checkout for best VCU Products and Services for further details mail us at [email protected] or visit our website, Dorleco.com
#CAN2.0#CANFD#Autonomousdriving#AWD#Motorcontrolstrategies#emobilitycontrols#Dorleco#VCUProducts#Sensorfusion#Programablevcu
0 notes
Text
Motor Control Strategies For All-wheel Drive Systems
May 30, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction:

All-wheel drive (AWD) systems, which improve grip, stability, and performance, have become an essential component of many automobiles in the world of automotive engineering. Motor Control Strategies are fundamental to these AWD systems. In this blog post, we will look at the many types of motor control techniques used in AWD systems, including their benefits and how they boost driving dynamics and safety in different weather and road conditions.
The Fundamentals of All-Wheel Drive (AWD) Systems
It is critical to understand the principles of AWD systems before delving into motor control techniques. AWD systems are designed to convey power to all four wheels at the same time, as opposed to conventional two-wheel drive (2WD) cars, which only send power to two of the four wheels. Motor control strategies are used to transfer power among the wheels.
Types of AWD Systems:
Full-Time AWD: These systems permanently distribute power to all four wheels. They are commonly found in crossovers and SUVs. Full-time AWD provides consistent stability and traction, making it ideal for a wide range of driving situations, including rain, snow, and off-road terrain.
Part-time AWD: Systems with part-time AWD allow the driver to switch between two- and all-wheel drive as needed. Off-road vehicles and pickup trucks typically use these systems. When conditions deteriorate, such as on off-road tracks or slick ground, the driver can select AWD.
On-Demand AWD: To save gasoline, on-demand AWD systems generally run in two-wheel drive mode. However, they can instantly and automatically engage the other two wheels to add more traction when wheel slip is detected. Many contemporary sedans and small automobiles use this technique regularly.
Motor Control Strategies for Systems with AWD:
The motor determines strategies in AWD systems that determine how much power is given to each wheel. These approaches are critical for maximizing traction, stability, and performance. Several of the key motor control strategies used in AWD systems are described below.
Open Differential: The simplest and most common type of differential used in automobiles is the open differential. An open differential in an AWD system distributes power equally between the front and rear wheels. While this is effective under typical driving conditions, it may not be the best solution if one wheel loses traction. In these circumstances, the wheel with less traction may get the majority of the power, causing the wheel to spin.
Limited-Slip Differential (LSD): Open differentials have various disadvantages, which limited-slip differentials aim to address. LSDs allow for some variation in wheel speeds, providing the wheel with more power and better traction. They can be mechanical or electronic, and some cutting-edge AWD systems include electronic LSDs that can adjust power distribution in real time based on a variety of factors, like wheel speed, steering input, and throttle position.
Torque Vectoring: Torque vectoring is a more advanced motor control approach than just splitting power between the front and back wheels. It also controls the amount of power sent to the left and right wheels. Torque vectoring improves a vehicle’s handling, cornering, and stability by precisely controlling the torque given to each wheel.
Active AWD Systems: Modern AWD systems usually employ a multitude of sensors and control units to continuously analyze road conditions and driver inputs. When necessary, these systems may easily switch from 2WD to AWD by altering power distribution in real-time. They can also adjust the power distribution between the wheels based on variables such as wheel slip, steering angle, and acceleration.
Advantages of Advanced Motor Control Strategies.
Improved Traction: Advanced Motor Control Strategies improve traction by directing power to the wheels with the most grip. This is especially useful when the ground is sticky from rain, snow, or mud.
Improved Stability: Torque-vectoring AWD systems can improve a car’s stability in tight corners and during quick maneuvers. They reduce the potential for over- or under-steering by controlling power delivery to each wheel.
Optimized Fuel Efficiency: To save petroleum, many modern AWD systems are designed to run mostly in 2WD mode. They maintain traction and fuel efficiency by activating AWD only when necessary.
Versatility: AWD vehicles can handle a wide range of terrains and weather conditions thanks to better motor control methods.
Real-world Applications:
Let’s take a closer look at how various motor control strategies manifest in practical situations:
Off-roading: Torque vectoring and adjustable AWD modes are essential in off-road vehicles such as trucks and SUVs. When traveling rough terrain, steep inclines, or uneven ground, they can distribute power to certain wheels as needed.
Torque vectoring improves handling and traction in high-speed cornering in sports cars equipped with AWD systems. These systems can divide power between the left and right wheels, supporting the vehicle in maintaining its intended path.
Routine Commuting: AWD systems with advanced motor control strategies improve performance and safety even under routine driving circumstances. These devices can prevent wheel spin and loss of control on slick roads, reducing the likelihood of an accident.
Challenges and considerations:
Although motor control techniques have altered AWD systems, there are still certain challenges and factors to consider.
Cost: The high manufacturing and maintenance expenses associated with AWD systems, including complex motor control techniques, may have an impact on the vehicle’s overall cost.
Weight: The additional elements required for AWD systems can make a vehicle heavier, reducing handling and fuel efficiency. Manufacturers are attempting to reduce this by using lightweight materials and effective designs.
Maintenance: Because they have more components that can wear out or need repair than 2WD vehicles, AWD systems may require more maintenance.

Conclusion:
The performance and versatility of all-wheel drive systems in modern automobiles are largely due to motor control techniques. These strategies are at the heart of what makes AWD systems so valuable for drivers, whether it’s improving traction in slick conditions, increasing stability during hard driving, or permitting off-road adventures. As technology advances, we should expect ever more complex motor control algorithms to improve the capabilities of AWD systems, guaranteeing that cars can confidently negotiate a wide range of terrains and weather situations while providing improved handling and safety.
#ADAS#Autonomousdriving#AWD#Motorcontrolstrategies#emobilitycontrols#Dorleco#VCUProducts#Sensorfusion#Programablevcu
0 notes
Text
The Future Of Autonomous Driving And Emobility Controls
May 29, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

Unprecedented changes are emerging in the transportation scene as a result of the convergence of two disruptive technologies: autonomous driving and emobility controls. The combination of self-driving technology and electric vehicles (EVs) has immense promise as the globe strives for efficient and sustainable mobility solutions. The complicated systems that oversee and optimize EVs and charging infrastructure, known as eMobility controls, are key to this transformation.
This blog will look at the future of transportation by delving into the connections between autonomous driving and mobility control systems.
Autonomous Vehicles: A New Mobility Era.
The purpose of autonomous driving technology, often known as self-driving or driverless technology, is to enable vehicles to operate without the need for human intervention. For the technology to perceive the environment, make decisions, and move safely, a combination of sensors, cameras, LiDAR, radar, GPS, and complicated algorithms is used.
The Confluence Between Autonomous Driving and Emobility Controls
Despite being two distinct technologies, autonomous driving, and eMobility controls have the potential to dramatically change transportation systems in a variety of ways.
Effective Route Planning: Autonomous Driving and Emobility Controls can use real-time data from the charging infrastructure to design routes that maximize navigation and charging pauses. This ensures that cars choose the most energy-efficient routes and reduces charging wait times.
Energy-Aware Driving Strategies: To develop energy-efficient driving methods, eMobility controls can work with autonomous driving technology. To maximize efficiency, these strategies consider energy usage, battery state of charge (SoC), and regenerative braking.
Fleet Management Optimization: By implementing eMobility controls, autonomous EV fleets may streamline their operations. A centralized system that handles charging, dispatch, and routing can receive information from vehicles regarding their charge levels, expected arrival times at charging stations, and energy requirements.

Less Human Intervention: Because autonomous driving involves less human engagement, EV drivers can focus on other tasks such as organizing charging sessions or interacting with infotainment systems.
Challenges and Things to Think About
While the combination of autonomous driving and eMobility controls has immense potential, several difficulties must be addressed:
Safety and Redundancy: Integrating eMobility controls with autonomous driving demands robust safety measures and redundancy systems to ensure safe vehicle operation and charging.
Communication and Data Security: Autonomous vehicles and the charging infrastructure must communicate smoothly. It is vital to develop secure communication protocols to prevent unauthorized access and data breaches.
Infrastructure Readiness: For Autonomous Driving And Emobility Controls to completely realize their potential, charging infrastructure must be smoothly integrated with navigation and route planning systems.
Regulatory Framework: To assure safety, liability, and interoperability, the regulatory environment must adapt to the complexities of autonomous driving and bidirectional energy flow.
Future opportunities and synergies
Mobility-as-a-Service (MaaS): Autonomous electric cars (EVs) are easily integrated into MaaS systems, providing on-demand transportation while streamlining charging schedules and energy use.

Intelligent Charging Fleets: Autonomous electric vehicle fleets can act as dynamic charging networks. Vehicles can detect high-demand areas and send electricity to the grid or other vehicles.
Adaptive Driving Modes: To optimize vehicle performance and efficiency, autonomous driving systems can change their driving modes based on energy availability and grid demand. Data-Driven Insights: The data collected by self-driving EVs can provide valuable information regarding driving behaviors, charging habits, and energy consumption, assisting in the development of future mobility policies.

Conclusion
The combination of autonomous driving and emobility controls is a disruptive element that has the potential to transform transportation. We can create a safer, more effective, and environmentally friendly transportation ecosystem by combining the efficiency of electric mobility with the autonomy of self-driving technology. As technology advances, the intersection of these two sectors will accelerate the transition to a future of sustainable and intelligent transportation.
To learn more about Autonomous Driving And Emobility Control Systems, you can email us at [email protected] or visit the website Dorleco.com
0 notes
Text
Energy Control In Electric Fleets
May 27, 2024
by dorleco
with no comment
Others
Edit
Introduction
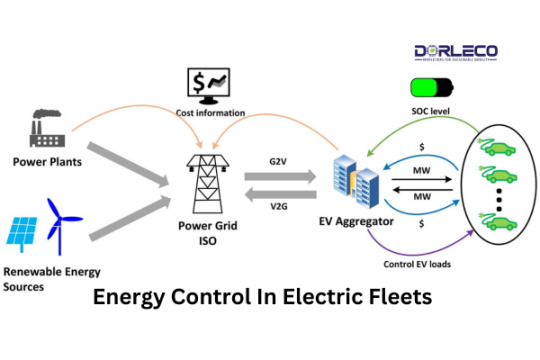
A fundamental upheaval is occurring in the transportation scene of the world as electric cars (EVs) gain popularity. The shift towards sustainable mobility impacts not just individual travel but also corporate procedures. Fleets of electric vehicles, ranging from delivery trucks to buses, have a great deal of potential to reduce emissions and operating costs. The secret to successful and productive electric fleets is efficient energy management.
This blog will discuss the concept of energy management in electric fleets, as well as the challenges and strategies surrounding this crucial aspect of future transportation.
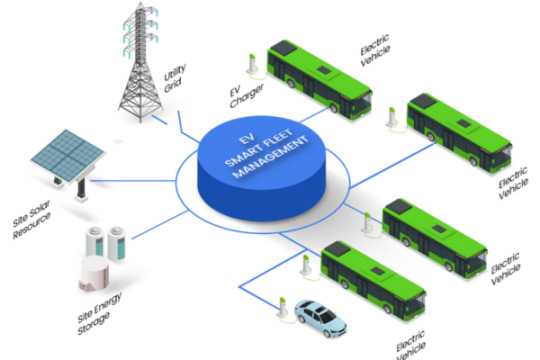
1. Electric Fleet Energy Management:
In electric fleets, energy management involves making the most of available energy sources to optimize vehicle performance, economy, and range. It encompasses an extensive array of strategies, instruments, and protocols that ensure electric fleet cars operate at optimal efficiency while reducing energy consumption, prolonging battery life, and improving overall fleet productivity.
2. The Significance of Energy Management in Electric Fleets
Savings on costs: Energy is a significant component of the total operational costs of any fleet. Effective energy management can save a lot of money by streamlining charge schedules, vehicle usage, and route planning.
Range optimization: Electric fleet cars need to be driven within their optimal range to continue operating at peak efficiency. By extending these vehicles’ driving range, energy management strategies reduce the need for frequent recharging and boost fleet productivity overall.
Environmental Impact: The primary drivers of electric fleets are the reduction of emissions and the advancement of a cleaner environment. By ensuring that these vehicles run on environmentally suitable fuel, energy management helps to lessen the environmental effect of transportation.
Battery Health and Longevity: Good energy management strategies extend the life of electric vehicle batteries by preventing deep draining, overcharging, and excessive charge levels. As a result, the fleet’s battery assets will require fewer replacements overall due to their extended lifespan.
3. Energy Management Difficulties for Electric Fleets Infrastructure for Charging:
There may be a limit on the quantity of charging stations in some locations, especially for company electric fleets. Effective management of charging resources is necessary to address this problem and ensure that cars have access to charging stations when needed. It is a challenging challenge to determine the best times to charge cars while accounting for peak energy demand, energy costs, and vehicle availability. Creating charging schedules that balance these factors is essential to efficient energy management.
Route Planning and Range Anxiety: When creating routes, electric fleets managers need to consider the vehicles’ range as well as the accessibility of charging stations. The fear that your battery will run out in the middle of a trip, sometimes known as range anxiety, can negatively impact how well your operations run.
Battery Degradation: Over time, batteries deteriorate due to cycles of charge and discharge. Effective energy management strategies are required to prevent excessive battery degeneration from lowering range and overall vehicle performance.
4. Efficient Energy Management Methods for Electric Vehicles with Optimal Charging Facilities:

Establishing a widely distributed and easily accessible charging network is crucial for electric fleets. Fleet managers must collaborate with charging infrastructure suppliers to ensure charging stations are positioned strategically to support fleet operations.
Demand response and intelligent charging: Fleets can adjust their energy use to match the demands of the grid and the cost of electricity by using smart charging alternatives. Demand response mechanisms allow vehicles to charge during off-peak hours when electricity rates are cheaper.
Route and Load Optimization: Implementing advanced route planning systems that account for vehicle range, traffic patterns, and charging station locations can improve fleet operations. Optimizing load makes optimal utilization of vehicles possible.
Predictive maintenance can help prevent unanticipated problems and reduce downtime by using real-time vehicle data. Well-maintained cars consume less energy and contribute to the overall effectiveness of energy management strategies.
Energy Storage Integration: By integrating stationary energy storage devices with the fleet charging infrastructure, demand control, and energy buffering are made possible. These systems can store excess energy during periods of low demand, and then release it during periods of high demand.
Fleet Telematics and Data Analytics: By gathering information from vehicle sensors and telematics systems, fleet managers can analyze driving patterns, energy use, and charging behavior. Data-driven insights enable optimization and intelligent decision-making.
5. Future Trends in Energy Management for Electric Fleets Vehicle-to-Grid (V2G) Integration:

With V2G technology, electric fleet vehicles may integrate energy sending and receiving to the grid during peak demand. This two-way energy exchange promotes grid stability and maximizes the value of fleet assets.
Autonomous Fleet Management: Fleets can benefit from energy-efficient autonomous route planning and vehicle coordination as autonomous vehicle technology advances. Autonomous systems can optimize vehicle utilization and provide real-time charging plans.
Blockchain Technology: Peer-to-peer energy trading inside electric fleets allows excess energy from one vehicle to be shared with others, further optimizing energy use. This is accomplished through the integration of blockchain technology.
AI and Machine Learning for Energy Predictions: Robust machine learning algorithms can predict energy consumption trends, vehicle usage, and grid availability. This enables more accurate energy management and efficient charging methods.
Conclusion :
Energy management in electric fleets is a dynamic and essential component of the transition to sustainable transportation solutions. As electric fleets become more common, their success will depend on how well they use available energy supplies. With smart charging, predictive analytics, and emerging technology, energy management in electric fleets promises improved operational efficiency, less environmental impact, and cost savings in the future. The future holds great promise for a fleet ecosystem that is cleaner, more efficient, and interconnected.
Check out the best VCU Products and services. For further inquiries, mail us at mailto:[email protected] or visit our website, Dorleco.com
0 notes
Text
Introduction To Emobility Controls
May 25, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction To Emobility Controls

The worldwide transportation industry is undergoing a seismic shift due to electric mobility, or eMobility, which is a more ecologically friendly and sustainable alternative to conventional fossil fuel-powered automobiles. The core of this change is an innovative and complex set of systems known as eMobility controls. These controls encompass a wide range of advancements and technologies that are critical to the upkeep, modification, and management of electric vehicles (EVs) and the associated charging infrastructure.
This comprehensive study will explore the realm of Introduction To Emobility Controls, highlighting its components, significance, and potential for the transportation sector.
1. Being Aware of the Introduction To Emobility Controls
eMobility controls, a sophisticated network of hardware and software, govern several aspects of electric cars, charging stations, and their interactions with one another. The invisible architects of a cohesive, efficient, and long-lasting eMobility ecosystem are these controllers. eMobility controls, which regulate everything from battery performance to ensuring safe and intelligent charging, are at the forefront of promoting innovation in the transportation industry.
2. eMobility component controls
The vehicle management system, or VMS: An electric vehicle’s brain is called the VMS. It oversees and controls a wide range of functions, including battery management, power distribution, energy recovery, thermal management, and general vehicle performance. By maximizing these settings, the VMS encourages energy efficiency, extends driving range, and offers a reasonable trade-off between performance and energy saving.
Command of the Infrastructure for Charging: For EVs to be successful, a dependable charging infrastructure is necessary. eMobility controllers for charging stations manage power distribution, voltage management, and grid connectivity. In the end, these controls lessen grid stress during periods of high demand by enabling intelligent charging, demand response management, and load balancing.
Communication protocols: Effective communication between the different components of the eMobility ecosystem is crucial. Secure and efficient data sharing is facilitated by standardized communication protocols like ISO 15118 and Open Charge Point Protocol (OCPP) between electric vehicles, charging stations, energy management systems, and smart grids. This compatibility is necessary for an eMobility network to be cohesive and networked.
System for Energy Management (EMS): The EMS of an electric vehicle is crucial for optimizing energy distribution and utilization. By analyzing driving behaviors, traffic patterns, and battery conditions, the EMS determines the most efficient way to use the energy. More driving range and overall improved performance are the outcomes of this.
Battery Management System (BMS): The BMS is responsible for monitoring and managing the battery’s health and performance. It ensures safe charging and discharging, prevents potentially hazardous situations like deep discharge or overcharging, and provides up-to-date temperature, charge, and health information about the battery.

3. Importance and Advantages
Efficiency Gains: One of the main factors contributing to increased energy efficiency is eMobility controls. By intelligently controlling energy usage, distribution, and charging, these controls extend the driving range of electric vehicles and minimize energy waste.
Enhancement of User Experience: There are many benefits for drivers using these settings. Features like remote vehicle diagnostics, predictive maintenance alerts, and individualized energy-saving suggestions enhance driving enjoyment and simplify automobile ownership.
Grid Integration: By permitting bidirectional energy transmission between EVs and the grid, eMobility regulations promote system stability. When energy is most needed or in low supply, EVs can act as mobile energy storage devices, adding extra energy to the grid.
Environmental Impact: To ensure that electric vehicles are charged when renewable energy is most plentiful, eMobility regulations are crucial. Because these controls effectively integrate renewable energy sources, they help reduce the carbon footprint of the transportation sector.
Advanced battery management and temperature control technology ensure that electric vehicles operate safely. Through the prevention of issues like thermal runaway and overheating batteries, these measures guarantee the safety of the car and its occupants.
4. Challenges and Innovations on the Future Road
As eMobility advances, the significance of its controls will rise. Novel and intriguing advancements such as advanced driver assistance systems, vehicle-to-grid communication, and the ultimate transition to self-driving electric vehicles are all anticipated. These advancements will call for sophisticated control systems to manage the intricate linkages between cars, the infrastructure needed to charge them, and the electrical grid.
However, there are challenges. Standardizing communication protocols and achieving interoperability is challenging due to the use of diverse systems by numerous vendors and stakeholders. Additionally, ensuring cyber security to prevent possible hacking or unauthorized access is a big issue as eMobility systems become more and more networked.
Conclusion
In conclusion, An Introduction To Emobility Controls The unsung heroes of the electric vehicle revolution are controls. These intricate systems enable the seamless operation of electric cars, charging stations, and the wider energy infrastructure. The enhanced efficiency, enhanced user experience, and environmental sustainability of eMobility controllers will result in cleaner and more intelligent transportation in the future.
As technology advances, we might expect increasingly sophisticated eMobility controls, which will help to further characterize the upcoming era of mobility. The integration of electric vehicles with renewable energy sources, grid services, and digital infrastructure will be fuelled by the continuous innovation and advancement of these crucial eMobility control systems.
Check out the best VCU Products for Electric Vehicles and services for emobility controls.
0 notes
Text
Challenges And Future Trends In Emobility Controls.
May 2, 2024
by dorleco
with no comment
eMOBILITY CONTROLS

Introduction
The electrification of transportation, or eMobility, is ushering in a new era of economical and environmentally friendly mobility options. At the core of this shift are eMobility Controls, a sophisticated ecosystem of technologies that optimize, monitor, and regulate numerous aspects of electric vehicles (EVs) and the infrastructure supporting their charging. While eMobility controls have made progress possible, they also provide several challenges and intriguing opportunities for the future.
This blog will go over the fascinating trends that are going to transform electric mobility and the challenges that eMobility Control is currently dealing with.
1. Difficulties with eMobility Control, Interoperability, and Standardization:
There are many different parties involved in the eMobility business, such as energy providers, car manufacturers, and companies that provide charging stations. Ensuring smooth communication and compatibility among different components is challenging due to the absence of standardized communication standards. The development of universal protocols that enable successful device communication will be critical to the establishment of an integrated eMobility ecosystem.
Cybersecurity Concerns: There is a greater chance of hacking as eMobility systems become more networked and share more data. By exploiting weaknesses in eMobility controls, hackers could be able to get access to cars or the infrastructure needed to charge them. Developing strong cybersecurity defenses against potential incursions is crucial for maintaining customer safety and privacy.
Energy Management and Optimization: Finding the perfect balance between efficacy and efficiency remains challenging, even though eMobility controls are designed to optimize energy distribution and consumption. Complex algorithms and predictive analytics must be used to take into account a variety of factors, such as changing driving conditions, driver behavior, and the availability of energy from renewable sources, to achieve effective energy management.
Integration of Renewable Energy Sources: Charging electric vehicles (EVs) with renewable energy is a step in the right direction toward sustainability. It can be difficult, nevertheless, to integrate eMobility controls with sporadic energy sources like solar and wind power. Among the difficulties are ensuring grid stability, effectively managing energy storage, and balancing energy production with the demand for vehicle charging.
Putting Vehicle-to-Grid (V2G) in Place: V2G technology has the infrastructure, legislative, and technological challenges on the way to becoming widely used, despite its immense promise for energy storage and grid stabilization. Automakers, utilities, and government agencies must work together to provide the frameworks required to enable EVs to easily participate in bidirectional energy flow.

2. Prospects for Mobile Controls in the Future
Advanced Predictive Analytics and Machine Learning: The integration of machine learning and predictive analytics will have a significant impact on eMobility controls in the future. With the use of previous data, driving patterns, and outside variables, these systems can optimize energy use, charging schedules, and even forecast maintenance requirements with a high degree of precision.
Intelligent Energy Management: Even more sophisticated energy management methods will be available with upcoming eMobility controllers. To maximize energy efficiency, minimize charging expenses, and enhance the overall driving experience, these controls will consider real-time information like as traffic patterns, weather predictions, and grid load.
Autonomous Parking and Charging: As autonomous driving technology advances, it is anticipated that eMobility controls will include features for parking and charging autonomously. It is conceivable for autonomous vehicles to navigate to charging stations, position themselves for optimal energy transmission, and initiate the charging process.
Integration of Wireless Charging: Recharging electric vehicles (EVs) with wireless charging is rapidly proving to be a viable and efficient solution. Future eMobility controllers will have to supervise wireless charging systems to guarantee accurate location, efficient energy transfer, and a smooth interface with vehicle management systems.
Blockchain Technology for Secure Transactions: Blockchain technology can improve the security, trust, and transparency of e-mobility transactions. It could be feasible to facilitate peer-to-peer energy trading, securely authenticate charging sessions, and streamline billing processes.
Fleet Management Optimization: eMobility Controls will progress to offer fleet management solutions that optimize routing, charging schedules, and energy consumption as more fleet cars transition to electric vehicles. This will reduce operating costs and increase the efficiency of fleet operations.

Conclusion
eMobility controllers, which facilitate the seamless operation of electric vehicles and charging infrastructure, are driving the electrification revolution. Energy management, cyber security, and interoperability are challenges, but they also present opportunities for creativity and collaboration. The topics of intelligent automation, energy management, wireless charging, predictive analytics, and mobility have significant potential for the future of eMobility. The mobility industry is ready to overcome challenges and welcome these advancements to build a connected, efficient, and sustainable transportation system.
For more information on our VCU architecture, components, and software development skills for battery-specific applications, as well as to explore our superior VCU products and services, send an email to [email protected].
0 notes
Text
Autonomous Agricultural and Construction Vehicles
October 31, 2023
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction
A major technological leap in farming and building is represented by Autonomous Agricultural and Construction Vehicles. These cars can function with little assistance from humans because of their sophisticated sensors, GPS, and artificial intelligence systems. This article introduces these cutting-edge devices, summarizing their salient characteristics, advantages, and possible drawbacks of Autonomous Agricultural and Construction Vehicles.
Important Characteristics of Self-Driving Construction and Agricultural Equipment
Technology of Perception and Sensors: Autonomous cars can sense their surroundings thanks to a variety of sensors installed in them, including GPS, LiDAR, radar, and cameras. These sensors give the car real-time information about its surroundings, which aids with navigation and decision-making.
Artificial Intelligence (AI): AI systems analyze the sensor data and decide how to maneuver the vehicle, carry out tasks, and avoid obstacles. Over time, the vehicle’s decision-making abilities are frequently enhanced through the use of computer vision and machine learning.
GPS and Mapping: Accurate navigation requires high-precision GPS devices. Digital maps of the work area are frequently pre-programmed onto vehicles, enabling them to follow predetermined paths and carry out duties with remarkable accuracy.

Remote Monitoring and Control: A lot of self-driving cars come with features that let their operators monitor and manage operations from a distance. This function improves safety and enables on-the-fly modifications in real time.
Interoperability: Autonomous vehicles can interact with other farm equipment and management systems in an agricultural setting to enable coordinated activities like planting, harvesting, and irrigation.
Safety Features: Safety is a top priority in the design of autonomous cars. To avoid collisions, they frequently have emergency stop systems and collision avoidance systems.
Advantages of Autonomous Agricultural and Construction Vehicles
The construction and agricultural industries stand to gain greatly from the many benefits that autonomous cars provide. The following are some of the main benefits:
Enhanced Productivity: Because autonomous cars can operate nonstop, they can accomplish tasks more quickly and with more efficiency. This is especially helpful in agriculture, where crop output depends on timely tasks like planting and harvesting.
Precision and Consistency: These vehicles follow predetermined routes and carry out jobs consistently, operating with a high degree of precision. Increased crop productivity, higher-quality building, and more efficient use of resources are all possible outcomes of this precision.
Cost Savings: Since autonomous cars require fewer human operators, labor costs may be lower in the long run. They use less fuel and resources because they run more effectively.
Operational Efficiency: Using information from sensors and AI algorithms, autonomous cars may instantly modify their course and optimize their routes. This flexibility leads to less waste and more effective use of resources.
Safety: Autonomous vehicles in the construction industry can carry out dangerous operations, such as excavation and demolition, without endangering human operators. They can lessen the physical strain on employees and assist in preventing field accidents in agriculture.
24/7 Operation: Since autonomous vehicles don’t need to sleep or take breaks, they can operate around the clock. This is especially useful at the most important times of the agricultural cycle.
Reduced Environmental Impact: By using resources like water and fertilizers more effectively, autonomous agricultural vehicles can lessen their negative effects on the environment and increase sustainability. Waste in construction can be decreased by optimizing resource use.
Data Gathering and Analysis: A multitude of data regarding the environment, agricultural conditions, and building sites can be gathered by these vehicles. To improve operations, long-term planning, and decision-making, this data can be evaluated.

Disadvantages of Autonomous Agricultural and Construction Vehicles
Although autonomous Agricultural and Construction Vehicles have many benefits, there are a number of drawbacks and difficulties that must be taken into account when putting this technology into practice. The following are some of the main drawbacks:
High Initial Costs: The acquisition and assimilation of self-driving cars and related technologies might be costly, potentially impeding their widespread use, particularly in small and medium-sized enterprises.
Maintenance and Repairs: Because autonomous cars are intricate machinery, they occasionally need professional personnel for repairs in addition to routine maintenance. When compared to conventional vehicles or equipment, maintenance expenses may be higher.
Liability and Legal Issues: Determining who is responsible for accidents or mistakes involving self-driving cars might be complicated, necessitating modifications to existing legal frameworks. It might be difficult to navigate the legal and regulatory environment.
Data security: A lot of data, including environmental and mapping data, is gathered and sent by autonomous cars. To stop misuse, hacking, or theft, it is essential to protect the security and privacy of this data.

Job Displacement: In industries where labor has historically been needed, the use of autonomous cars may result in employment displacement. It will be difficult to manage the social and economic effects of this relocation.
Technological Restrictions: Because autonomous cars rely on a variety of sensors and technology, they could have trouble operating in inclement weather, dimly lit areas, or challenging terrain. Restrictions imposed by technology may hinder their performance.
Human Oversight and Intervention: The ability of autonomous cars to function fully independently may be limited if they still need human supervision to manage difficult or unexpected scenarios.
Adaptation and Training: To properly operate, monitor, and maintain autonomous vehicles, personnel and operators may need to complete training. It may require some time and effort to become used to this new technology.
Conclusion:
In conclusion, autonomous agricultural and construction vehicles represent a transformative leap forward in the fields of farming and construction. These vehicles offer a wide array of benefits, including increased productivity, precision, cost savings, and enhanced safety. They have the potential to revolutionize the way we approach tasks in these industries, making them more efficient, sustainable, and safe.
However, their adoption is not without challenges. High initial costs, regulatory complexities, maintenance requirements, and potential job displacement are factors that must be carefully considered. These challenges emphasize the need for a strategic approach to implementation and a focus on long-term planning.
Despite these challenges, the advantages of autonomous vehicles cannot be overlooked. As technology continues to advance and regulations catch up, the integration of autonomous agricultural and construction vehicles is likely to become more widespread. The key will be to balance the advantages with the disadvantages and mitigate potential risks effectively.
In the coming years, as technology evolves and becomes more accessible, autonomous agricultural and construction vehicles have the potential to drive significant improvements in efficiency, safety, and sustainability, ultimately benefiting both businesses and the broader society. It is a promising path towards a future where we achieve more with less, while also ensuring that our agricultural and construction industries remain competitive and environmentally responsible.
#Autonomouscontrols#Agriculturalvehicles#ConstructionVehicles#selfdrivingcars#KeylessEntry#Cybersecurity#StartSystems#dorleco#controlsystem#ADAS#eMobilityControls#AVRescueProtocols#automotive#controlunit
0 notes
Text
Autonomous Vehicle Software
October 30, 2023
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction:
Self-driving cars, also known as autonomous vehicles, have quickly gained popularity as a ground-breaking technology that has the potential to completely change transportation. Modern software systems installed in these cars allow them to navigate and function on the road without the need for human assistance. In this overview of autonomous car software, we’ll look at the main elements, difficulties, and developments in the field of autonomous technology.
Essential Elements of Software for Autonomous Vehicles:
The software for autonomous vehicles is a complex system made up of various essential parts:
Perception: To sense its surroundings, the car’s perception system uses sensors including cameras, radar, LiDAR, and ultrasonic sensors. These sensors gather information about the environment around the car, such as other cars, people walking, traffic lights, and the state of the road.
Localization: The car needs localization in order to comprehend its exact location on the road. For precise localization, inertial measuring units (IMUs), GPS, and map data are utilized.
Mapping: Autonomous cars require high-definition maps. The vehicle is able to make educated decisions because of these maps, which offer comprehensive information about traffic signs, lane markings, and road layout.
Control: To make driving judgments in real-time, the control system analyzes data from perception, localization, and mapping. For safe navigation, it regulates the car’s braking, steering, and acceleration.
Planning and Decision-Making: Based on maps and the observed surroundings, the planning module creates a route for the vehicle, and the decision-making part weighs the pros and cons of each option before choosing the safest and most effective course of action.
Developments in Autonomous Vehicle Software:
The field of autonomous vehicle software has made significant strides recently, with important developments occurring in the following areas:
AI and machine learning: Algorithms for machine learning are enhancing the vision and judgment of self-driving cars, allowing them to take in information from the actual world and adjust to novel circumstances.
Simulation: By enabling developers to test and validate autonomous software in a variety of scenarios, extensive simulation environments can eliminate the requirement for in-person testing.
Connectivity: By sharing data with other cars, the traffic system, and pedestrians, autonomous vehicles can improve efficiency and safety through V2X (vehicle-to-everything) connectivity.
Over-the-Air (OTA) Updates: By addressing security flaws and enhancing performance, OTA software updates enable autonomous cars to receive regular software upgrades.

Pros of Autonomous Vehicle Software
Self-driving car software, or autonomous vehicle software, has several potential advantages and benefits. These advantages have the power to completely transform transportation while also boosting efficiency and safety. The following are a few of the main advantages of autonomous car software:
Increased Safety: Autonomous vehicles have the potential to drastically lower the frequency of collisions brought on by driver error, including speeding, distracted driving, and driving under the influence. Accidents may be reduced as a result of the software’s ability to obey traffic laws, keep safe distances, and make prompt, accurate decisions.
Reduced Traffic Congestion: By interacting with traffic infrastructure and one another, autonomous cars can improve traffic flow. This can lessen traffic congestion by easing blockages and increasing the general effectiveness of transportation networks.
Enhanced Accessibility: People with impairments, the elderly, and those unable to drive due to medical conditions may have more mobility thanks to autonomous vehicles. Their freedom and quality of life may both be greatly enhanced by this.
Environmental Benefits: Fuel economy and pollution can be optimized by programming autonomous cars. Air pollution and greenhouse gas emissions may decline in the future as a result of the switch to electric and driverless vehicles.
Reduced Parking Demand: Autonomous vehicles that can park and drop off people can lessen the need for parking spots in cities, utilizing valuable real estate more wisely.
Time savings: Traveling in an autonomous car allows passengers to make better use of their time. For commuters, this may result in higher output as well as better relaxation and lower stress levels.

Economic Benefits: From software development to vehicle maintenance, the development and implementation of autonomous cars have the potential to provide jobs across a range of industries. It can also help sectors like delivery services and ride-sharing.
Enhanced Mobility Services: On-demand, shared mobility services can be made possible by autonomous technology, which will save customers money and increase the convenience of transportation. Additionally, it may lessen the necessity for individual car ownership.
Cons of Autonomous Vehicle Software
Although autonomous car software has a lot of potential advantages, there are a number of issues and problems that need to be resolved. The following are some drawbacks and issues with software for autonomous vehicles:
Safety and Reliability: Despite advancements, questions remain regarding the dependability and safety of autonomous cars. Ongoing difficulties include technology malfunctions, software bugs, and the capacity to manage complicated and unforeseen circumstances.
High Development Costs: The process of creating and testing software for autonomous vehicles is costly and resource-intensive. For many businesses, this expense can be a barrier to entry, which could lead to higher car prices.
Cyberattack vulnerability: Software and data transmission play a major role in autonomous cars. They become more susceptible to cyberattacks as a result, endangering their security and safety. One of the main concerns is being protected from cyber dangers.

Legal and Regulatory Difficulties: The laws and regulations pertaining to self-driving cars are constantly changing. It can be difficult to determine who is responsible for accidents or software malfunctions, which could impede the use of the technology.
Job displacement: As autonomous vehicles become more widely used, jobs in sectors including delivery, cab services, and haulage may be lost, thereby disrupting the economy and displacing drivers.
Ethical Dilemmas: In the event of an imminent collision, autonomous cars may have to decide between protecting pedestrians and the people in the vehicle, for example. Solving these moral conundrums is a difficult task.
Privacy Concerns: A lot of data, including location and passenger personal information, is collected and stored by autonomous cars. To stop abuse or breaches, data privacy and security must be guaranteed.
Limited Accessibility: Due to the high expense of autonomous technology, some socioeconomic groups may not be able to use it, which could lead to unequal access to transportation options.
Conclusion:
In conclusion, autonomous vehicle software represents a transformative technology that holds the promise of revolutionizing transportation and mobility. While the benefits are substantial, including improved safety, reduced traffic congestion, enhanced accessibility, and environmental advantages, it’s essential to recognize the challenges and concerns associated with this technology.
Safety and reliability, high development costs, cyber vulnerabilities, legal and regulatory hurdles, job displacement, ethical dilemmas, and privacy issues are among the significant cons that must be addressed as autonomous vehicles continue to evolve. Additionally, the impact on the job market and the potential for job displacement in transportation-related industries are subjects of concern that merit careful consideration.
The ongoing research, development, and collaboration among government agencies, industry stakeholders, and academia are crucial in overcoming these challenges and ensuring the responsible integration of autonomous vehicles into our transportation systems. Regulatory frameworks are evolving, and safety measures are continuously improving, with a strong emphasis on data privacy, security, and ethical considerations.
As the technology matures and these concerns are addressed, the potential for safer, more efficient, and more accessible transportation systems becomes increasingly attainable. Autonomous vehicle software represents a pivotal chapter in the evolution of mobility, offering not only convenience and efficiency but also the prospect of enhancing the overall quality of life for people around the world. Its success will ultimately depend on the ability to strike a balance between innovation and addressing the associated challenges, with a focus on the safety and well-being of all road users.
#Autonomouscontrols#EmergencyResponse#selfdrivingcars#KeylessEntry#Cybersecurity#StartSystems#dorleco#controlsystem#ADAS#eMobilityControls#AVRescueProtocols#automotive#controlunit
0 notes
Text
Cyber security for Autonomous Vehicles
October 27, 2023
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction:
In the automobile business, autonomous vehicles, sometimes known as self-driving cars, are a game-changing technological advancement. These automobiles have the power to improve travel conditions generally, lessen traffic, and raise road safety. But as a result of its incorporation into our roads, a whole new set of security issues have surfaced. An overview of Cyber security for Autonomous Vehicles will be given in this introduction, along with a focus on the significance of protecting these cutting-edge modes of transportation.
The Importance of Cyber Security for Autonomous Vehicles
Data-Driven Operation: In order to make judgments in real time, autonomous cars mostly rely on communication networks and data. Any loss of availability or integrity of data might have dire repercussions.
Safety Issues: Passengers’ and other drivers’ safety may be in danger if autonomous cars are compromised. Accidents can occur when sensors are manipulated or when the operations of the vehicle are controlled remotely.
Privacy Concerns: A lot of information about the whereabouts and actions of passengers is gathered by autonomous cars. To preserve privacy, this sensitive information must be protected.
Economic Impact: The market for autonomous cars is expected to reach $1 trillion. Cybersecurity breaches may disrupt this developing market, resulting in monetary losses and eroding public confidence.
Key Cyber Security Challenges:
Vehicular Networks: Through intricate networks, autonomous cars can interact with infrastructure and with one another. These networks must be secured in order to stop illegal access and data breaches.
Sensor Systems: LiDAR and cameras are two examples of sensors that are essential for perception and navigation. It is possible to trick the car using these sensors, which poses a risk to safety.

Software Vulnerabilities: The complex software systems that autonomous cars rely on could have flaws. Software security and patching are essential to preventing exploits.
Over-the-Air (OTA) Updates: OTA updates improve the security and functionality of vehicles. It is imperative to guarantee the validity and integrity of these updates.
Human-Machine Interface (HMI): Infotainment systems and other HMI components need to be secured against hacking attempts that can compromise the operation of cars.
Mitigating Cyber Security Risks:
Encryption: To avoid data theft and eavesdropping, data should be encrypted both while it is in transit and at rest.
Intrusion Detection Systems: Use cutting-edge intrusion detection technologies to keep an eye on network activity and spot irregularities.
Firmware Validation and Secure Boot: Make use of secure boot procedures to guarantee that the car’s systems are running only approved firmware.
Multi-Factor Authentication: Use strong authentication methods, such as multi-factor authentication, to gain access to car systems and data.
Collaboration and Regulation: Encourage cooperation between automakers, authorities, and cyber security professionals to create and implement industry standards and laws.
Advantages of Cybersecurity for Autonomous Vehicles
Numerous benefits are provided by cybersecurity for autonomous vehicles, which are essential for guaranteeing the dependable and safe functioning of these vehicles. These benefits are critical to the success and widespread acceptance of autonomous vehicle technology and the safety of both passengers and the broader public. The following are the main benefits of cybersecurity for self-driving cars:
1. Safety and Reliability:
Cybersecurity measures protect autonomous cars from malevolent cyberattacks, preventing the compromise of their vital operational systems. This improves safety by reducing the possibility of unwanted access, data theft, or manipulation of vehicle functionality.
Avoiding Accidents: Cybersecurity precautions might lessen the likelihood of mishaps brought on by hacking into car controls or sensors. Ensuring the accuracy of decisions and preventing collisions requires safeguarding the integrity of sensor data and communication systems.
2. Data Privacy:
Safeguarding Personal Information: Autonomous cars collect a tonne of information about the whereabouts and activities of their occupants. Passenger privacy is preserved via effective cybersecurity, which guarantees that this sensitive information is kept private.
Adherence to Data Regulations: With data privacy laws such as the CCPA and GDPR in force, it is imperative to guarantee the security of personal information in autonomous cars in order to prevent legal ramifications.
3. Maintaining Public Trust:
Building Confidence: Maintaining Public Trust in a strong cyber security framework fosters public, manufacturer, and passenger trust. If passengers feel that their privacy and safety are guaranteed, they are more likely to accept autonomous vehicles.
Maintaining Reputation: Manufacturers of autonomous vehicles and the technology in general risk having their good name damaged by a single cyber security incident. Robust cyber security safeguards the industry’s reputation.
4. Preventing Financial Loss:
Safeguarding Investments: The automobile industry, manufacturers, and stakeholders have to make substantial investments in autonomous vehicles. By averting security breaches and the resulting financial losses, cyber security contributes to the protection of these investments.
Liabilities Reduction: Cyber security for Autonomous Vehicles measures might lessen the possibility of legal ramifications from autonomous vehicle-related accidents or privacy violations.
5. Meeting Industry Standards:
Complying with Regulations: The development and implementation of autonomous cars require adherence to cybersecurity standards and regulations. Government agencies and business associations frequently demand adherence to these criteria.
Reducing Regulatory Barriers: Good Cyber security for Autonomous Vehicles procedures can make it easier for producers of autonomous vehicles to comply with regulatory regulations, hastening the commercialization of the technology.
6. Secure Updates:
Over-the-air Updates: Over-the-air (OTA) updates are frequently used in autonomous vehicles. Cybersecurity makes sure these upgrades are safe and uncheckable. This stops software vulnerabilities and illegal changes.

7. Continuous Improvement:
Adaptability: Because cybersecurity is dynamic, it must constantly evolve to meet new threats. Cybersecurity procedures for autonomous vehicles allow for continuous improvement and tinkering with security protocols.
Disadvantages of Cyber Security for Autonomous Vehicles
Although Cyber security for Autonomous Vehicles is crucial for self-driving cars, putting these precautions in place has significant drawbacks and difficulties. To successfully address and minimize these difficulties, awareness of them is essential. The following are a few drawbacks of cybersecurity for self-driving cars:
Cost and Complexity: Putting strong cybersecurity safeguards in place can be expensive and time-consuming. The cost of developing autonomous vehicles may go up as a result of the substantial financial and human resources needed to create, maintain, and update security systems and protocols.
Performance Impact: There may be a performance cost associated with certain cybersecurity solutions, such as intrusion detection systems and encryption. This may have an impact on autonomous cars’ ability to make decisions in real time, which could cause delays in reacting to urgent circumstances.
Negatives/False Positives: Intrusion detection systems might mistakenly identify genuine threats or produce false alerts. This can be a big problem because ignored threats might have serious repercussions, and false alarms can cause needless interventions or service interruptions.
Regulatory Compliance: Although following regulations is necessary to guarantee a minimal level of security, it might be difficult to do so. It can be difficult for manufacturers to comply with various regional standards and laws when they change.
Resource Constraints: In the autonomous vehicle sector, smaller or newly established businesses may find it difficult to set aside enough funds for effective cybersecurity procedures. This may cause their cars to have security flaws.
User Experience: The user experience may suffer from overly stringent cybersecurity measures. Passengers may become irritated and discouraged from using autonomous vehicles as a result of overly stringent security procedures, such as frequent identification reminders.

Interoperability Problems: It can be difficult to make sure that different autonomous car systems and parts are interoperable with one another and follow cybersecurity guidelines. Vulnerabilities resulting from incompatibilities could be exploited by attackers.
Conclusion:
In conclusion, Cyber security for Autonomous Vehicles is a critical and evolving field that plays a pivotal role in the successful integration of self-driving cars into our transportation systems. The advantages of robust cybersecurity measures, including safety, data privacy, public trust, financial protection, regulatory compliance, and the facilitation of secure over-the-air updates, are significant and far-reaching. These advantages not only safeguard passengers and the public but also contribute to the continued growth and success of the autonomous vehicle industry.
However, it is equally important to acknowledge the challenges and disadvantages associated with implementing Cyber security for Autonomous Vehicles. These challenges, such as increased complexity and cost, potential performance impacts, and the need to strike a delicate balance between innovation and security, underscore the need for a comprehensive and adaptable approach to cybersecurity.
Addressing these challenges requires collaboration among autonomous vehicle manufacturers, cybersecurity experts, regulators, and stakeholders. It necessitates ongoing research and development to stay ahead of evolving threats and vulnerabilities. Moreover, it emphasizes the importance of designing security measures that do not hinder the user experience but rather enhance it.
As autonomous vehicles become an integral part of our future transportation landscape, ensuring that they are secure from cyber threats is not just a technical concern but a social and ethical responsibility. By proactively addressing these challenges and leveraging the advantages of Cyber security for Autonomous Vehicles, we can pave the way for safer, more efficient, and more reliable autonomous vehicles that benefit society as a whole. Cybersecurity is the linchpin in this endeavor, providing the assurance that the promise of self-driving cars can be realized while minimizing the risks associated with them.
#Autonomouscontrols#EmergencyResponse#selfdrivingcars#KeylessEntry#Cybersecurity#StartSystems#dorleco#controlsystem#ADAS#eMobilityControls#AVRescueProtocols#automotive#controlunit
0 notes
Text
Autonomous Vehicle Simulation and Testing
October 26, 2023
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction
Autonomous vehicles, sometimes known as self-driving automobiles, are a revolutionary development in the auto sector. These cars could improve accessibility, efficiency, and safety in transportation. To assure their safety and dependability, they must first go through thorough modeling and testing before being used on a big scale. This introduction gives a general overview of the Autonomous Vehicle Simulation and Testing while emphasizing their significance, essential elements, and difficulties.
1. Importance of Autonomous Vehicle Simulation and Testing:
Safety Assurance: It is crucial to guarantee the safety of autonomous cars. Testing and simulation offer a controlled environment to find and fix potential system flaws, preventing accidents and preserving public confidence.
Regulatory Compliance: Autonomous cars are subject to strict regulatory requirements. Manufacturers can demonstrate compliance with these criteria with the aid of Autonomous Vehicle Simulation and Testing.
Cost-Efficiency: Testing under actual conditions can be expensive and time-consuming. Simulations enable rapid data collecting and cost-effective testing.
Performance Optimization: Autonomous vehicle systems can be improved for best performance, responsiveness, and dependability through Autonomous Vehicle Simulation and Testing.
2. Components of Autonomous Vehicle Simulation and Testing:
Sensor Simulation: Autonomous vehicles rely on a variety of sensors, including LiDAR, radar, cameras, and GPS. The responses of the vehicle to various events are evaluated by simulations that imitate sensor inputs.
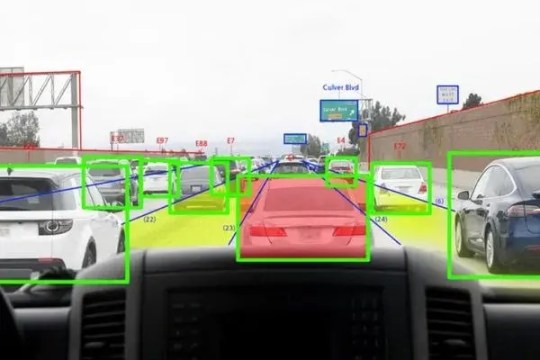
Environment modeling: To simulate real-world situations such as traffic, pedestrians, and weather, virtual environments are constructed. This makes testing possible in a variety of difficult circumstances.
Behavioral Modeling: Simulation models the behavior of the vehicle, including course planning and collision avoidance, to assess its capacity for safe navigation.
Data Logging and Analysis: During simulations and tests, a large amount of data is collected, which is then examined to find potential problems, confirm system performance, and enhance algorithms.
3. Testing Types:
Hardware-in-the-Loop (HIL): The autonomous vehicle’s hardware components, such as sensors and controllers, are evaluated in a simulated environment during Hardware-in-the-Loop (HIL) testing. As a result, early validation is possible without deploying the entire vehicle.
Software-in-the-loop (SIL): Software-in-the-loop (SIL) testing entails executing the software for an autonomous vehicle in a simulated setting. It evaluates the algorithms and decision-making processes used by the vehicle.
Vehicle-in-the-loop (VIL): Vehicle-in-the-loop (VIL) is a method for simulating traffic and environments while using actual automobiles. This strategy creates a link between simulation and practical testing.
Real-World Testing: To verify system performance once the Autonomous Vehicle Simulation and Testing in safe environments are successful, real-world testing is carried out on closed rails and open highways.
4. Challenges:
Realism: High levels of realism in simulations can be difficult to achieve. Simulated settings must faithfully reflect actual environmental conditions.
Scenario Diversity: It is crucial to test autonomous vehicles in a variety of situations, including uncommon and edge instances that can be challenging to thoroughly replicate.
Regulatory Framework: The process of creating a precise regulatory framework for the certification and testing of autonomous vehicles is one that is both difficult and dynamic.
Cybersecurity: Because autonomous vehicles are susceptible to cyberattacks, security testing is an important step in the development process.
Pros of Autonomous Vehicle Simulation and Testing
The development and use of self-driving automobiles are made possible by the many benefits that autonomous vehicle simulation and testing provide. A few of the main benefits are as follows:
1. Safety Enhancement:
Autonomous vehicle modeling and testing offer a safe and controlled environment to spot and address potential security flaws. This reduces the risks linked to driverless vehicles.
2. Reduced Real-world Testing Costs:
Comparatively speaking to testing on actual roads, simulation testing is more economical. Development becomes more effective and inexpensive when costs for gasoline, maintenance, and the requirement for real test tracks are eliminated.
3. Scalability:
Engineers may assess an autonomous vehicle’s performance under a variety of settings and scenarios using simulations, which allows for quick scaling and eliminates the need for significant real-world testing.
4. Scenario Reproducibility:
Simulated environments make it simpler to compare results, validate improvements, and gauge how the vehicle will behave in various scenarios by precisely replicating scenarios and conditions.
5. Quick Iteration:
Engineering can quickly discover problems and take action to fix them thanks to simulation, which promotes more rapid development of hardware and software.
6. Data Collection and Analysis:
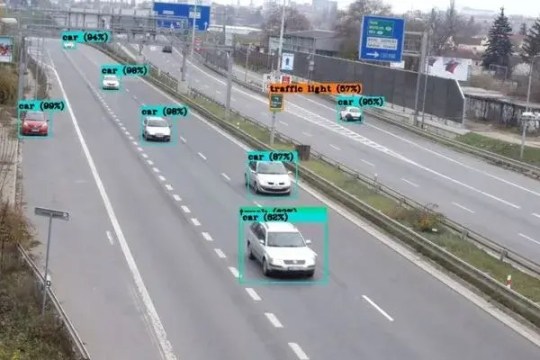
7. Privacy and Security:
Simulated testing lowers the danger of intellectual property theft and privacy violations by avoiding exposing sensitive information or proprietary technologies on public roads.
8. Versatility:
In order to conduct a thorough examination, simulations can reproduce a variety of driving situations, including extreme scenarios that are risky or difficult to replicate in real-world testing.
Cons of Autonomous Vehicle Simulation and Testing
Although testing and simulating autonomous vehicles has many benefits, there are some drawbacks and difficulties with these methods as well. The following are some drawbacks of testing and simulating autonomous vehicles:
1. Limited Realism:
Simulated settings might not always accurately reflect the complexity of actual environmental factors, which could pose problems for evaluating the performance of autonomous vehicles. Unrepresentative factors may include human drivers’ unpredictable behavior, unmodeled road dangers, and changes in infrastructure.
2. Overfitting:
Autonomous systems may underperform when exposed to unanticipated real-world settings if they have been fine-tuned primarily using simulation data.
3. Sensor Realism:
It’s possible that simulated sensor data won’t accurately reflect the nuances of real sensor inputs, which could cause differences between the system’s performance in simulation and in practice.
4. Incomplete Scenario Coverage:
Comprehensive scenario database creation can be a time-consuming and difficult undertaking for simulations. There is a chance of missing unusual but important circumstances that are essential for assessing the safety of an autonomous vehicle.
5. Simulation Uncertainty:
The reliability of test findings might be impacted by uncertainty and modeling mistakes in the simulation environment. If simulations are not thoroughly tested, this could create a false sense of security.
6. Hardware-in-the-Loop (HIL) Complexity:

7. Data and Processing Demands:
Massive volumes of data are produced during simulation, and this data needs to be stored, processed, and analyzed, which can be costly and resource-intensive.
8. Dynamic Traffic Interactions:
Due to their unpredictable nature and the requirement for high-fidelity modeling, real-time interactions with other road users, like as pedestrians, cyclists, and human drivers, can be difficult to simulate.
Conclusion:
In conclusion, autonomous vehicle simulation and testing are indispensable components of the development and deployment of self-driving cars. These processes play a pivotal role in enhancing the safety, reliability, and functionality of autonomous systems. While there are both pros and cons associated with these methods, their collective impact is overwhelmingly positive, shaping the future of transportation in significant ways.
However, it is important to acknowledge the challenges and limitations that come with Autonomous Vehicle Simulation and Testing, such as the need for realistic modeling, the risk of overfitting, and the complexity of edge cases. Real-world testing remains essential to validate the technology under unpredictable and complex conditions.
Balancing simulation with real-world testing is critical to achieving the necessary safety and reliability standards for autonomous vehicles. The ongoing development and integration of these methods will continue to play a central role in the future of transportation, paving the way for safer, more efficient, and more accessible Autonomous Vehicle Simulation and Testing.
#Autonomouscontrols#EmergencyResponse#selfdrivingcars#KeylessEntry#HybridVehicle#StartSystems#dorleco#controlsystem#ADAS#eMobilityControls#AVRescueProtocols#automotive#controlunit
0 notes
Text
Autonomous Vehicle Control
October 25, 2023
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction
Autonomous vehicles, often known as self-driving cars, are an innovative technology that has the potential to change the way we travel and how we conduct our daily lives. These vehicles use a combination of sensors, software, and control systems to make real-time driving decisions in a manner comparable to that of a human driver. They are built to navigate and run autonomously. We’ll look at the basic ideas and elements of autonomous vehicle control in this introduction.
1. Sensors:
Different types of sensors are included in autonomous cars, which provide them access to crucial data about their environment. These sensors consist of:
Lidar: Laser-based sensors that produce precise 3D representations of the surroundings of a moving object.
Radar: Radio waves are used by radar to measure an object’s distance and relative speed.
Cameras: Use cameras to take pictures and movies that can be used to identify other vehicles, traffic signs, and lane markings.
Ultrasonic sensors: Locate things in the immediate area to help with parking and slow-moving maneuvers.
GPS: Offers location data and aids with navigation.
2. Control systems:
To make judgments in real time, autonomous cars rely on highly developed control systems. These systems analyze sensor data and carry out directives for vehicle control, such as steering, braking, acceleration, and more. Even in complicated and dynamic surroundings, control algorithms guarantee safe and effective driving.
3. Perception and Mapping:
Algorithms for perception aid the vehicle’s understanding of its surroundings. They identify things, anticipate their movements, and weigh the hazards. Simultaneously, mapping software builds accurate, current maps of the road system to help the vehicle navigate.
4. Localization:
Autonomous vehicles must constantly be aware of their exact location. For this, GPS is insufficient on its own. By fusing sensor data with map information, sophisticated systems like Simultaneous Localization and Mapping (SLAM) assist vehicles in maintaining precise placement.
5. Making Decisions:
The autonomous vehicle’s decision-making algorithms constitute its brain. To decide whether to change lanes, when to stop at a traffic signal, and how to avoid obstacles, they examine sensor data, traffic conditions, and route information. While taking into account variables like traffic regulations and passenger preferences, these algorithms must prioritize safety.
6. Communication:

7. Safety and Redundancy:
The safety of autonomous cars is of the utmost importance. To lessen the effects of component failures, these vehicles are built with numerous layers of redundancy, including backup sensors and control systems. They also go through a lot of testing and validation to ensure they meet high safety standards.
8. Challenges and Ethical Considerations:
The creation and use of autonomous cars present a number of difficulties, including moral and legal issues. For instance, it is still difficult to determine who is responsible for an accident involving an autonomous car. It is also up for dispute how these cars should prioritize safety in morally dubious circumstances.
Pros of Autonomous Vehicle Control
Numerous potential advantages of autonomous vehicle control could revolutionize the way we view transportation. A few of the main benefits of autonomous vehicles are as follows:
Safety Enhancement: Traffic accidents could be drastically decreased by autonomous vehicles. Human mistake, such as driving while distracted or having poor judgment, is to blame for the majority of accidents. Roads may become safer as a result of autonomous cars’ ability to abide by traffic regulations and make decisions based on sensor data.
Lessening of Traffic Congestion: Because autonomous vehicles can communicate with one another and the traffic infrastructure, there will be less traffic congestion. They can coordinate lane changes, intersections, and mergers to ease traffic congestion and minimize stop-and-go patterns.
Increased gasoline Efficiency: Because autonomous vehicles can optimize their driving habits and speeds, they use less gasoline overall. This can lessen greenhouse gas emissions and the overall negative effects of transportation on the environment.
Enhanced Mobility for the Elderly and Disabled: People who are unable to drive due to disability or age-related restrictions may experience a new degree of mobility thanks to autonomous vehicles. Their independence and quality of life may both benefit from this.
Increased Productivity and Leisure Time: Passengers in autonomous vehicles can make better use of their trip time through increased productivity and leisure time. While the car is driving, the occupants can work, read, or enjoy themselves. This may boost overall productivity and lessen commute-related stress.
Reduced Parking Demand: The demand for premier parking spaces in city centers can be decreased by autonomous vehicles’ ability to pick up passengers and Then Park in more distant or practical locations. This may result in reduced need for parking infrastructure and more effective use of the area.
Savings: Autonomous cars have the ability to bring down the price of transportation as a whole. Autonomous ride-sharing services have made it possible for people to choose on-demand transportation over owning a personal vehicle, saving money on costs like maintenance, insurance, and fuel.

Cons of Autonomous Vehicle Control
Although autonomous vehicle technology has a lot of potential, there are also a number of possible risks and difficulties. The following are some drawbacks and issues with autonomous vehicle control:
Limitations of the technology: The technology of autonomous vehicles is still developing, and it is not infallible. They may find it difficult to function in bad weather, handle unforeseen circumstances, or correctly detect items like walkers and bikers.
High Development Costs: Developing and testing autonomous vehicle technology requires significant financial investment. These expenses might make the technology prohibitively expensive for smaller businesses, which would raise the cost of vehicles.
Cyber security Risks: Because autonomous vehicles rely so heavily on connectivity and software, they are vulnerable to hacking and other online attacks. Vehicle security and privacy could be jeopardized by a successful attack.

Concerns regarding data privacy: Autonomous vehicles gather a ton of information about their environment, passengers, and travel habits. There are worries about how this data is handled, used, and protected, which may violate people’s right to privacy.
Liability and Legal Issues: It can be difficult to determine who is at fault in an accident involving an autonomous vehicle. Is the owner at fault, the software creator, or the manufacturer of the vehicle? These legal problems can be difficult to resolve.
Job displacement: As autonomous vehicles proliferate, there may be a loss of jobs in transportation-related sectors like trucking and taxi services. Economic and social ramifications may result from this.
Ethical Conundrums: When faced with a decision between two options, autonomous cars will confront ethical conundrums that could result in moral conundrums. For instance, the programming of the vehicle may be required to make challenging protection judgments in cases of inevitable collisions.
Regulatory Difficulties: Creating thorough legislation for self-driving cars is a difficult and time-consuming procedure. There may be inconsistencies and potential adoption barriers due to different areas and nations’ various laws and regulations.
Conclusion:
In conclusion, autonomous vehicle control represents a promising technological advancement with the potential to reshape the way we approach transportation. The integration of sensors, sophisticated software, and control systems allows these vehicles to operate with a high degree of autonomy, offering a range of potential benefits. These benefits include increased safety, reduced traffic congestion, improved fuel efficiency, enhanced mobility for disabled and elderly individuals, increased productivity during travel, and numerous environmental and cost-saving advantages.
However, it’s crucial to acknowledge the challenges and concerns associated with autonomous vehicles. These challenges encompass technological limitations, high development costs, cybersecurity risks, data privacy concerns, legal and liability issues, potential job displacement, ethical dilemmas, and regulatory complexities. Additionally, the adaptation of infrastructure, consumer trust, and accessibility disparities must be considered.
As the development and deployment of autonomous vehicles continue, it’s essential to strike a balance between harnessing their potential benefits and addressing the associated challenges. Thoughtful regulation, ongoing research and development, and a strong commitment to safety and ethical considerations will play a significant role in realizing the full potential of autonomous vehicle control. The path toward fully autonomous transportation may be complex, but it holds the promise of safer, more efficient, and more accessible mobility for the future.
#Autonomouscontrols#EmergencyResponse#selfdrivingcars#KeylessEntry#HybridVehicle#StartSystems#dorleco#controlsystem#ADAS#eMobilityControls#AVRescueProtocols#automotive#controlunit
0 notes
Text
Emergency Response and AV Rescue Protocols of Autonomous Vehicles
October 23, 2023
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction
Protocols for autonomous vehicles AV Rescue Protocols and emergency response are essential parts of maintaining the security and dependability of self-driving autos. It is crucial to understand how to react to emergencies and accidents involving autonomous vehicles as they become more commonplace on our roadways. We will examine the main ideas and procedures pertaining to AV rescue and emergency response in this introduction.
Acquiring a Basic Understanding of Autonomous Vehicles: Autonomous vehicles are outfitted with sophisticated hardware, software, and sensor systems that enable them to run autonomously. To navigate and make driving judgments, these cars combine sensors, cameras, radar, lidar, and sophisticated algorithms.
Different types of autonomous vehicles: Levels 0 through 5 (complete automation) are used to classify AVs. Emergency responders must be aware of a vehicle’s level of automation since it affects the vehicle’s capabilities and restrictions.
Different Kinds of Emergencies Involving AVs: Accidents, system failures, medical emergencies, and security breaches can all be autonomous vehicle emergencies. Effective emergency response is essential to reducing risks and guaranteeing the safety of all persons concerned.
First Responder Training: To deal with AV-related catastrophes, emergency responders, including firefighters, paramedics, and law enforcement, should get specialized training. The particular difficulties and safety concerns related to autonomous cars should be included in this training.
Communication with AVs: To engage with first responders, many AVs have external communication systems. These technologies can provide crucial details regarding the condition of the car and its occupants.
Vehicle Shutdown Protocols: To stop the vehicle from causing more damage, first responders may need to turn off its autonomous capabilities. They should know how to safely turn off an AV without endangering the security of other people or themselves.
Passenger AV Rescue Protocols: Autonomous cars may transport occupants who require assistance to leave the vehicle. In cases of accidents or medical emergencies, first responders should have procedures in place for securely removing passengers from AVs.

Pros of Emergency Response and AV Rescue Protocols of Autonomous Vehicles
For autonomous cars, emergency response and AV rescue techniques have a number of benefits in terms of efficiency and safety. These procedures are necessary for tackling the particular difficulties brought on by autonomous vehicles and for guaranteeing a well-organized, efficient response to emergencies. Here are some major benefits of having set AV Rescue Protocols and emergency response protocols:
Increased Safety:
Advanced safety measures in autonomous vehicles, such as collision avoidance systems, can help lessen the severity of accidents. Rescue procedures guarantee that first responders can communicate with these systems successfully, potentially averting more harm.
Quick Reaction:
Emergency responders can move quickly if AV Rescue Protocols are in place and are clear because they know how to handle a problem and where to find the information they need. In instances where there is a risk of death, this is important.
Specialized Education:
First responders need particular training as a result of AV Rescue Protocols. As a result of this training, they will be better prepared to handle AV-related situations and increase both responders’ and passengers’ safety.
Communication:

Advanced safety measures in autonomous vehicles, such as collision avoidance systems, can help lessen the severity of accidents. Rescue procedures guarantee that first responders can communicate with these systems successfully, potentially averting more harm.
Speedy passenger rescue:
Guidelines are provided by AV Rescue Protocols techniques for removing people from driverless cars securely. In situations involving accidents or medical emergencies, responders can promptly take care of passenger demands.
Reduced dangers:
Responders use AV Rescue Protocols to reduce the hazards involved in turning off or disabling a vehicle’s autonomous systems. Using the right methods can lessen the possibility that the rescue operation would unintentionally result in further damage.
Collaboration with Manufacturers:
Protocols promote communication between AV makers and emergency responders. This collaboration enables a deeper comprehension of the technology and any system flaws, enabling more efficient solutions.
Cons of AV Rescue and Emergency Response Protocols for Autonomous Vehicles
Although emergency response and AV Rescue protocol methods for autonomous cars have many benefits, they also have several drawbacks and difficulties. To ensure that protocols can be regularly developed to handle future concerns, it is crucial to take these limitations into account. The following are some drawbacks and difficulties with AV rescue and emergency response protocols for autonomous vehicles:
Complexity:
Due to the rapidly changing nature of the technology, developing and implementing standards for autonomous vehicles can be challenging. It can be difficult to make sure that responders comprehend and acclimate to the complex systems of AVs.
Cost and Resource Requirements:
It can be costly to provide emergency personnel with specialized training and to set up the necessary infrastructure to conduct AV Rescue Protocols. Budgetary restrictions may be an issue for smaller emergency response agencies.
Different vehicle capabilities:
Responders find it difficult to assess the potential and constraints of any autonomous vehicle they come across because there are various levels of automation in use. This variability must be addressed by protocols.
Lack of Standardization:
In all areas and jurisdictions, there is a dearth of established practices and norms. The absence of consistency can make emergency response operations confusing and ineffective.
Data Privacy Concerns:
Privacy issues arise when handling and gaining access to data from autonomous vehicles (AVs), which may be storing sensitive passenger data. The requirement for data in accident investigations and privacy rights must be carefully balanced.
Liability Concerns

Rapid Technological Evolution:
Since AV technology develops swiftly, AV Rescue Protocols can easily become antiquated. For regulatory organizations and first responders, it might be logistically difficult to keep protocols current with the most recent developments.
Coordination Across Stakeholders:
Coordination between multiple stakeholders, such as government agencies, law enforcement, manufacturers, and insurance companies, is frequently necessary for an effective disaster response. Collaboration might be difficult to ensure.
Conclusion:
In conclusion, emergency response and AV rescue protocols for autonomous vehicles represent an essential component of ensuring the safe and effective integration of self-driving cars into our transportation systems. While these protocols offer significant advantages in terms of safety, efficiency, and public trust, they also come with various challenges and disadvantages.
The rapid evolution of autonomous vehicle technology, the need for specialized training, data privacy concerns, and issues related to standardization and coordination among stakeholders are among the notable challenges that must be addressed.
However, the benefits of well-established protocols, such as enhanced safety, quick response, efficient passenger rescue, and clear communication, far outweigh the drawbacks. With the continued development of these protocols, the collaboration of emergency responders, AV manufacturers, and regulatory bodies, and a commitment to staying current with technological advancements, it is possible to overcome these challenges.
In the ever-changing landscape of autonomous vehicles, emergency response and AV rescue protocols play a pivotal role in ensuring that the technology serves society safely and responsibly. These protocols will continue to evolve and adapt to meet the unique needs of autonomous vehicles, promoting safety, trust, and efficiency in the era of self-driving cars.
#AutonomousRacing#EmergencyResponse#selfdrivingcars#KeylessEntry#HybridVehicle#StartSystems#dorleco#controlsystem#ADAS#eMobilityControls#AVRescueProtocols#automotive#controlunit
0 notes