#ProgrammableVCU
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Tumblr Inc. is funded by 13 investors.
Text
EV Telematics control system
September 9, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction
The future of the automotive industry depends extensively on EV Telematics as it transitions towards electrification. This technology will be crucial in determining opportunities and obstacles and whether different strategies succeed or fail. Optimizing EV operations will require telematics’ valuable data on user behavior, energy economy, and vehicle performance. To properly utilize telematics as electrification advances, the sector must also solve obstacles like data security, infrastructure integration, and regulatory guidelines.
The increasing complexity associated with electric vehicle development will make telematics gathering data even more crucial in the future. Telematics systems will probably develop, gaining access to and using more data as the EV market steers the industry’s course. Telematics can add important context to the data collected and provide useful data about software and integrated technology systems when combined with a thorough analytics strategy. Telematics will continue to be a vital resource for the automotive industry as safety-optimized, technically advanced vehicles grow in capability.
Telematics in Automotive
Over the past few decades, telematics has been crucial to the automotive industry and is still an important part of product development. Telematics testing has been necessary for the correct validation of complex automotive systems and features in the integration of innovative technologies, such as advanced driver assistance systems (ADAS). Telematics goes beyond its conventional definition, which is the meeting point of information technology (IT) and telecommunications, encompassing data transmission, reception, and storage.
There are immediate obstacles, such range anxiety, to overcome before EV adoption becomes widely accepted. The ultimate goal is to lessen world reliance on foreign oil and improve the environment. Like many other areas of electrification, the optimization of EV telematics is strongly impacted by worries about battery life and constrained access to infrastructure for charging. Telematics is a useful tool that can help reduce range anxiety even though it can’t be removed because it offers immediate data on battery status, charging places, and the best routes. It’s critical to understand the overall operation of EV telematics before delving into the extra organizational advantages telematics can provide.
How does telematics work?

One of the benefits of telematics is that organizations have various platforms to choose from depending on their needs. Some teams may opt for Azure, while others may prefer Amazon Web Services. Regardless of the platform, the goal is to use a system that efficiently stores data points in the cloud. By presenting this data in charts or other visual formats, organizations can identify and extract valuable insights. This leads to thorough analytical evaluations, empowering them to make informed decisions. The telematics process follows a similar path for many, with information being gathered, stored, and transformed into actionable insights. This journey plays a key role in how organizations leverage telematics for product development, remaining an essential tool as OEMs continue to produce new EV models.
By connecting to the hardware and sensors of the car, the telematics device shows information about the battery life, the length and distance of the trip, the speed and acceleration, the GPS location, and vehicle maintenance. Additionally, telematics improves the effectiveness of subsystem interactions by directly connecting to EV subsystems.
For example, as infotainment subsystems grow in complexity to support more innovative technology, they will offer improved driver usability. Similarly, components like dash cameras, which assist drivers, are likely to become more common in future EV models. The CAN bus acts as a highway for all this information, enabling various components to communicate and transmit data seamlessly.
Important advantages telematics may offer to the development of EVs
The overall advantages that telematics brings to the advancement of EVs are as follows:
Transforms vehicle data into actionable assets: Transforms raw vehicle data into useful information that businesses may use to make decisions: Telematics transforms vehicle data into assets that can be used immediately.
Contextual evidence is offered for decision-making: Telematics data removes uncertainty and misunderstanding in the decision-making process by providing context, which supports decisions.
1. Monitor Driver Behaviour
Drivers are a valuable asset, but even one careless driver might put your company at serious risk. You can keep an eye on driver performance with EV telematics instead of depending on “How’s my driving?” hotline calls.
These solutions give fleet managers a thorough, up-to-date picture of driver behavior by continuously gathering data from fleet vehicles. Routes, distance traveled, driving time, average speed, incidences of severe braking or acceleration, and noteworthy occurrences like breakdowns or accidents are all included in the data that is recorded and easily accessed.
Fleet managers may intervene and rectify inefficient, careless, or risky driving with the use of this comprehensive understanding, which can reduce vehicle wear and tear, prevent accidents, prolong battery life, and eventually minimize insurance costs.
2. Monitor Vehicle Range in Real Time
There are some situations that even the best route planning cannot foresee. Unexpected circumstances may occur and force vehicles onto longer, less effective routes. This is not a big deal for a diesel fleet because drivers can fill up at the closest station. However, if there isn’t a proper charging station close by, it may be disastrous for an EV fleet.
For this reason, EV telematics is crucial for fleets that run on electricity. It gives fleet managers real-time information on the amount of remaining range in their vehicles, enabling them to swiftly adapt to unforeseen delays or detours by rerouting to incorporate adjacent charging stations as necessary.
3. Improve Routes Effectively

This supports proactive, data-driven route planning in addition to providing fleet managers with vital vehicle status updates and aiding in the prevention of theft. By planning routes that take into account the availability of charging infrastructure along the way, fleet managers can minimize problems like range anxiety and optimize battery efficiency.
Other benefits of real-time tracking include avoiding collisions, gridlock, and road construction. The majority of EV telematics packages frequently come with these features as standard.
4. Establish Charging Schedules and Alerts
One of the major challenges for fleet managers transitioning to electric vehicles is maintaining consistent vehicle charges. This requires careful coordination of schedules, routes, traffic conditions, and environmental factors such as elevation, weather, and temperature.
A robust EV telematics system like Trakm8 simplifies this process by leveraging real-time data from these and other factors. It offers continuous charging updates, allows fleet managers to prioritize vehicle recharging based on schedules and routes, and identifies available charging stations, enabling drivers to choose the optimal route for their current charging needs. If a vehicle’s battery reaches a critical level, fleet managers receive alerts to take immediate action.
5. Receive Health Alerts
EV telematics systems equipped with sensors give fleet managers valuable insights into vehicle and overall fleet health, enabling predictive maintenance.
Conclusion:
EV telematics is anticipated to change the automobile industry over the next ten years. While precise dates and benchmarks are unknown, progress is unavoidable. The investigation of telematics and analytics for contemporary transportation has created an opportunity that is unlikely to close. Organizations should keep spending money on sophisticated telemetry solutions as the drive toward electrification increases, realizing that more data is always beneficial.
Three things can be counted on from an efficient telematics system: performance optimization, a strong security framework, and zero data loss. Particularly, performance needs to be considered a fine art since only select groups may truly recognize its worth. Telematics should be seen as a safety measure even by individuals who don’t rely on it significantly. Most businesses try to minimize operational uncertainty, and telematics offers vital visibility in situations where incomplete or ambiguous data could result in errors or failures. Product development will be becoming more complicated as the market moves toward EVs with cutting-edge technology and greater complexity. For these technologies to work as intended, telematics and data insights will be essential.
0 notes
Text
V-Model development techniques to design
August 1, 2024
by dorleco
with no comment
Control Systems
Edit
Introduction

The Verification and Validation Model, often known as the V-Model or the V-Cycle, is a software development methodology that prioritizes testing throughout the entire process. It’s a Waterfall approach modification that’s widely used in critical system development when thorough testing is necessary. The V-Model’s two main stages are completed in the following order:
1. Verification (left side of the V):
a. Analysis of requirements :
– Identify and document the client’s needs.
– Based on customer input, determine software and system requirements.
b. System Design:
Develop a high-level design specification by referring to the requirements.
– Explain the system’s overall architecture.
c. Architecture:
Create a comprehensive system architecture.
– Explain the interfaces that the system’s various components have with one another.
d. Module Design:
Break the system up into smaller, easier-to-manage parts.
– Clearly define each module’s requirements.
e. Implementation (Coding):

Write code according to the detailed module requirements.
1. Examining Units:
– Check that each module is accurate.
– Identify and fix module-level issues.
2. Validation (right side of the V):
a. Testing for integration:
To ensure that the modules work as a whole, integrate them and test them all together.
– Find and correct any errors in the modules’ interlobular communication.
b. Testing the system:
Test the system as a whole to make sure it meets the requirements.
Identify and fix issues at the system level.
c. The user acceptance test, or UAT:
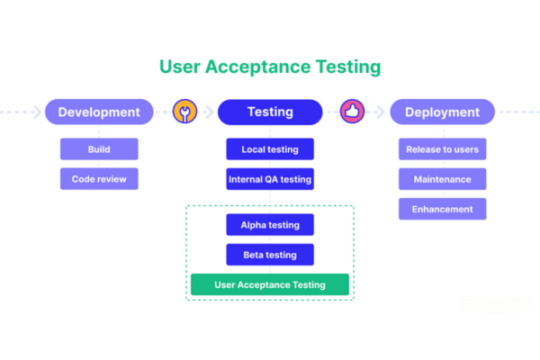
– Validate the solution by asking end users to attest that it meets their needs.
– Get user input and make necessary adjustments.
d. Initiation:
After testing is completed successfully, put the system into use.
Make sure that the necessary documentation has been completed.
1. Upkeep and Assistance: –
Assist continuously, fix issues that arise in the real-world setting, and implement any necessary improvements.
Important ideas and methods related to the V-Model:
The V-Model encompasses several fundamental concepts and techniques that guide its application in software development. The main concepts and techniques associated with the V-Model are as follows:
Initial Testing
Principle: Testing activities are initiated early in the development life cycle.
Technique: Unit testing is used in the early stages of test preparation and execution to guarantee that errors are identified and corrected as soon as practical.
2. An incremental and phased approach:
Principle: Development and testing have distinct periods.
Methodology: Testing is organized based on the stages that make up the development process. Systems that are only partially functional can be sent for testing and validation thanks to incremental development.
3. Trackability:
Principle: There should be a clear, traceable relationship between requirements and relevant tests.
Method: Make and maintain traceability matrices that link each requirement to the tests that verify its fulfilment. This ensures that all tests are covered thoroughly.
4. Loops of Feedback:
Principle: Continuous input is essential during the development and testing phases.
Methodology: As defects are found during testing, they are communicated to the development team for resolution. The quality of the software is improved by this loop of iterative feedback.
5. Record-keeping:
Concept: Extensive documentation is necessary at every stage of development and testing.
The method entails producing and maintaining current, comprehensive documentation for the design, requirements, test cases, and test plans. This documentation serves as a guide and comprehension tool for the duration of the system.
6. Testing and Development in Parallel:

Methodology: Testing for each phase is ongoing as the related development stage moves forward. Using a parallel approach reduces the likelihood that major defects will emerge later by allowing problems to be identified and solved sooner.
7. Well-defined positions and responsibilities:
It is important to specify the roles and duties of the development and testing teams.
Method: Assign specific duties to individuals or teams for each level of the V-Model. This establishes accountability and clarifies who is in control of what.
8. User Engagement:
Principle: User engagement is necessary for both validation and acceptance.
Method: Involve users in the User Acceptance Testing (UAT) stage to ensure the system meets their needs and expectations.
9. Management of Configurations:
Principle: Supervise and control changes made to the software and associated resources.
Technique: To keep version control, monitor changes, and ensure consistency between the development and testing processes, use configuration management procedures.
10. Comprehensive Testing:
Principle: All aspects of the system ought to be put to the test. Technique: Plan and execute a range of tests, including unit, integration, system, and user acceptance testing, to confirm the program’s accuracy and dependability.
Drawbacks of the main ideas and methods connected to the V-Model
Even while the V-Model offers a structured approach to software development with integrated testing, it is not without its drawbacks. The following are some limitations and drawbacks associated with the primary concepts and techniques of the V-Model:
1. Inflexibility and Rigidity:
Cons: When it comes to modifying needs, the V-Model could be less adaptable and more rigid. It makes the challenging assumption that needs are clear-cut and unchanging, which makes it challenging to adjust as the project develops.
2. System Visibility After Hours:
Cons: It takes a long time for the system to become fully visible during the development life cycle. This could lead to erroneous perceptions of user requirements or a delay in identifying design flaws, which makes problem-solving more challenging and costly.
3. Minimal User Engagement:
The only time consumers are often involved is during the User Acceptance Testing (UAT) phase. This could result in the discovery of significant issues or misunderstandings later on in the procedure when fixing them will be more expensive.
4. Dependency on Proactive Scheduling
Limitation: The effectiveness of the V-Model depends on having a firm understanding of the needs and starting early. If the needs change or the initial planning is flawed, delays and significant barriers could occur.
5. Nature in Sequence:
Cons: The V-Model follows a sequential path in which the completion of one phase depends on the success of the one before it. This could lead to a longer development timeframe, especially if changes are required after the project starts.
6. Insufficient Length for Iterative Development:
Cons: Iterative or incremental development approaches do not work well with the V-Model. It could not be compatible with modern agile methodologies, which strongly emphasize flexibility and quick reaction to changing requirements.
7. Excessive Focus on Testing
Cons: The V-Model may overemphasize testing as a stand-alone step, even though testing is crucial. This approach could not be effective for projects incorporating agile methodologies, which call for continuous testing and feedback
8. Presumption of Clearly Stated Needs:
Cons: The V-Model is based on the assumption that needs are precise and unchanging from the outset. As the project is being developed, adjustments may be necessary because needs often change.
9. Low Level of Client Involvement
Cons: User acceptability testing and requirements phases are usually the only times that customers or stakeholders are communicated with. This can result in a lack of ongoing contact and feedback throughout the development process.
10. Having Difficulties Handling Difficult Projects?
cons: The V-Model may face challenges when working on large, complicated projects with requirements that are not completely understood up front. An iterative and more flexible approach may be more appropriate in some circumstances.
Conclusion:
In summary, the V-Model’s core principles and techniques provide a structured, methodical approach to software development that emphasizes early testing and traceability. However, it’s crucial to consider both the benefits and drawbacks of the V-Model:
When choosing the V-Model, it’s critical to consider the project’s needs for stability, the organization’s overall development plan, and the project’s type. Though it might not be ideal for every project, the V-Model might be helpful in instances where a systematic, logical, and well-documented development process is required and if needs changes are either minor or properly managed. However, for projects that require more flexibility and adaptability, different methodologies like Agile may be more appropriate.
0 notes
Text
Transmission control systems
July 31, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

In the context of automotive technology, transmission control systems are the parts and systems that regulate how a car’s gearbox operates. An essential part of an automobile is the transmission, which directs engine power and distributes it to the wheels so the car can drive forward. Transmissions come in two primary varieties: automatic and manual.
These are a few crucial parts of the transmission control system.
1. Manual Transmission:
When using a manual gearbox, the driver engages and selects ratios manually using the clutch pedal and gear changer.
The clutch mechanism in a car with a manual gearbox is a component of the transmission control system; it releases the engine from the transmission to enable gear changes.
2. Gearbox Automation:
Gear shifts in an automatic transmission system are managed by the transmission control module (TCM) or transmission control unit (TCU) independently of the driver.
When determining when to shift gears, the TCM gathers data from sensors, such as throttle position and vehicle speed sensors.
3. DCT, or dual-clutch transmission:

Dual-clutch gears combine the best advantages of automatic and manual transmissions. By quickly engaging and pre-selecting gears with two clutches, they enable smoother and more efficient gear changes.
4. Transmission that Variably Capable (CVT):
By utilizing a belt, chain, and pulley system, CVTs provide an infinite number of gear ratios, allowing for smoother acceleration without the requirement for discrete gear shifts.
5. Electronic Control:
Modern transmission control systems require electrical components to function. The throttle position, load, engine speed, vehicle speed, and other variables are taken into account by the TCM or TCU while determining whether to shift gears.
6. Adaptive Transmission Control:
Some advanced transmission control systems are adaptive, meaning they may change their settings in response to evolving traffic conditions and driving patterns. By doing this, you can enhance driving performance, fuel efficiency, and enjoyment.
7. Torque Converter:
In automatic gearboxes, a torque converter is commonly utilized to transfer power from the engine to the transmission. It makes shifting gears easier and allows the engine to run even while the vehicle is not moving.
8. Shift Logic:
Certain shift logic algorithms are used by transmission control systems to decide when to upshift or downshift. These algorithms optimize fuel efficiency and performance by considering multiple parameters.
Transmission control systems’ advantages
Transmission control systems are quite helpful in terms of a vehicle’s overall driving pleasure, efficiency, and performance. Here are a few key advantages:
1. Enhanced Fuel Economy
Transmission control systems, especially in modern cars with electronic controls, can optimize gear ratios and shift points based on the driving conditions. This modification often leads to better fuel efficiency because it ensures the engine runs as effectively as possible.
2. Enhanced Capabilities:
Vehicle performance is improved by the use of transmission control systems, which offer more efficient gear shift management. Accurate and fast shifts can enhance acceleration, responsiveness, and general driving qualities in any type of transmission — manual, dual-clutch, or automatic.
3. More Livable Operations:
Especially automatic transmissions, which eliminate the need for manual gear changes, make driving more enjoyable. By ensuring that shifts occur smoothly and on time, modern control systems improve passenger comfort.
4. Flexibility in Driving Environments:
Many modern gearbox control systems are designed with adaptability in mind. These systems adjust shift patterns in response to factors including load, road conditions, and driver behavior to maximize performance in a range of scenarios.
5. Less fatigue among drivers:
Particularly when traveling long distances or through heavy traffic, automated gearboxes reduce driver fatigue. Removing the need to constantly engage the clutch and shift gears, allows drivers to focus more on the road.
6. Less fatigue among drivers:
Particularly when traveling long distances or through heavy traffic, automated gearboxes reduce driver fatigue. Removing the need to constantly engage the clutch and shift gears, allows drivers to focus more on the road.
7. Astute Gear Selection
Automatic transmissions have a transmission control system that can intelligently choose the appropriate gear based on the load, road conditions, and driver input. This ensures that the vehicle is always in the optimal gear for the conditions, improving efficiency and performance.
8. Smooth Stop-Start and Idle Engine Systems:
To guarantee a smooth engine idle, several transmission control systems can be paired with stop-start systems. By shutting off the engine while the automobile is stationary and starting it again when needed, these systems reduce the amount of gasoline used and pollutants produced when idling.
9. Decreased Pollution:
Transmission control systems can help cut emissions by improving engine performance and efficiency. Fuel consumption and pollutant emissions can be decreased with efficient gear shifts and improved engine control.
Transmission control system drawbacks
Transmission control systems offer numerous benefits, but they also have certain drawbacks. Here are a few potential drawbacks:
1. Cost and Complexity:
The control systems for modern gearboxes can be very complex, especially in vehicles with advanced electrical equipment. The intricacy of these systems sometimes leads to higher production costs, and because they require specialized knowledge and diagnosis, maintenance may be more expensive.
2. Upkeep and Restoration:
When a transmission control system malfunctions, fixing it can be costly and challenging. Not all repair businesses have the tools necessary to replace or reprogram electrical components, sensors, and control modules when these tasks become essential.
3. Issues with Reliability:
The electrical parts of transmission control systems are prone to mistakes or malfunctions. Reliability is crucial; any issues with the transmission control system could make driving challenging or possibly impossible, and possibly even cause the automobile to break down.
4. Restricted User Authority:
Certain contemporary automated transmissions are completely under the direction of the transmission control module (TCM). Giving up manual control may be irritating for some drivers, especially enthusiasts who prefer shifting gears themselves, even though it can lead to more effective and seamless working.
5. Drivers’ Learning Curve:
Certain drivers may have trouble acclimating to the behavior of specific transmission control systems, particularly if they are used to a different sort of transmission. For example, a continuous variable transmission (CVT) may require significant adjustment when transitioning from a standard automatic to one.
6. The risk of relying too much on electronics
The increasing reliance on transmission control systems on electronic components raises questions about the consequences of electrical breakdowns on vehicle operation. Without specialized equipment, operating the vehicle or diagnosing an electronic system issue could be more difficult.
7. Production of Heat:

Electronic components generate heat when they operate. Overheating in transmission control systems may lead to issues with the reliability and efficiency of electronic components. Adequate cooling systems must be used to prevent overheating issues.
8. Limited Aftermarket Modification Compatibility:
Certain aftermarket modifications, such as performance upgrades or custom tuning, might not function flawlessly with the original transmission control system. If this isn’t corrected, driving issues or even gearbox damage could result.
Conclusion:
In summary, transmission control systems are essential to contemporary cars, affecting things like performance, fuel economy, and overall driving pleasure. These systems have several advantages, regardless of whether they control continuously variable, dual-clutch, manual, or automatic transmissions.
The benefits include reduced driver fatigue, particularly with automatic transmissions, increased fuel efficiency through optimum gear ratios, improved vehicle performance with smoother and quicker changes, and adaptation to changing driving conditions. Reduction of pollutants improved towing capacity, and longer component life are further benefits of transmission control systems.
It’s crucial to recognize a few disadvantages of transmission control systems, though. These include the systems’ expense and complexity, possible difficulties with upkeep and repairs, issues with dependability, and restrictions on user control, especially with some automatic transmissions. Other things to think about include potential incompatibilities with aftermarket modifications, a learning curve for drivers adjusting to new gearbox technologies, and issues with electronic component failures.
Despite these shortcomings, continuous technological developments seek to solve these issues and raise the general performance and dependability of transmission control systems. These systems will probably get more advanced as cars continue to develop, offering greater advantages while reducing some of the negatives that come with them.
Practically speaking, careful driving, following manufacturer instructions, and routine maintenance can help drivers get the most out of their transmission control systems. Even while there are disadvantages, they are surpassed by the benefits that well-thought-out and well-operating transmission control systems may offer in terms of effectiveness, performance, and general driving enjoyment.
0 notes
Text
AV Rescue Protocols of Autonomous Vehicles
July 29, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

Autonomous Vehicle Protocols AV Rescue Maintaining the security and dependability of self-driving cars requires protocols and emergency response. As autonomous vehicles become more prevalent on our roads, we must know how to respond to crises and accidents involving them. In this introduction, we will look at the key concepts and practices related to AV rescue and emergency response.
Gaining an Intense Knowledge of Self-Driving Cars: The advanced hardware, software, and sensor systems that autonomous cars are equipped with allow them to function independently. These vehicles use complex algorithms, sensors, cameras, radar, lidar, and radar to navigate and make driving decisions.
Different types of autonomous vehicles: Several kinds of self-driving car AVs are categorized using Levels 0 through 5 (full automation). The degree of automation in a car influences its capabilities and limitations, therefore emergency responders need to know.
Different Types of AV Emergencies: Autonomous vehicle emergencies might include medical crises, system malfunctions, accidents, and security breaches. Efficient emergency response is critical to mitigating hazards and ensuring everyone’s safety.
First Responder Training: Emergency responders, including firemen, paramedics, and law enforcement, should have specialized training to handle AV-related disasters. This training should include the unique challenges and safety issues of autonomous vehicles.
Communication with AVs: A lot of AVs have external communication systems that they can use to interact with first responders. These technologies can deliver vital information about the state of the vehicle and its occupants.
Vehicle Shutdown Protocols: First responders may need to disable the vehicle’s autonomous features to prevent more damage from being done. They ought to be able to safely disable an AV without jeopardizing their own or others’ safety.
Procedures for Passenger Autonomous Vehicle Rescues: Autonomous vehicles possess the capability to rescue passengers in need of assistance. In the case of an accident or medical emergency, AVs should have procedures in place that allow first responders to securely remove passengers.
Advantages Benefits of Autonomous Vehicle Rescue and AV Response Protocols
The effectiveness and safety of emergency response and autonomous vehicle rescue approaches are numerous for self-driving automobiles. These protocols are required to ensure a coordinated and effective response to emergencies as well as to address the unique challenges posed by autonomous vehicles. The following are some significant advantages of having emergency response and AV rescue processes established:
1. Enhanced Security
Cutting-edge safety features in self-driving cars, like collision avoidance systems, can mitigate the severity of collisions. Rescue protocols ensure that first responders can effectively communicate with these systems, possibly preventing more damage.
2. Swift Response:
Emergency responders can act quickly if they are aware of the established and acknowledged AV Rescue Protocols because they will know how to handle a problem and where to find the information they need. When there is a possibility of death, this is vital.
3. Particularized Instruction:
AV Rescue Protocols necessitate special training for first responders. They will be more equipped to manage AV-related scenarios and improve responders’ and passengers’ safety because of this training.
4. Interaction:
Numerous AVs are equipped with communication devices that let them tell emergency responders of information. This can include information about the kind of emergency, the health of the car’s occupants, and potential dangers, enabling a more thoughtful reaction.
Cutting-edge safety features in self-driving cars, like collision avoidance systems, can mitigate the severity of collisions. Rescue protocols ensure that first responders can effectively communicate with these systems, possibly preventing more damage.
5. Quick passenger rescue:

AV Rescue Protocols methods offer guidelines for safely extracting individuals from driverless autos. Responders can quickly attend to passenger needs in cases of accidents or medical emergencies.
5. Decreased risks:
Responders use AV Rescue Protocols to reduce the hazards involved in deactivating or stopping a vehicle’s autonomous systems. If the right methods are applied, there is a decreased chance that the rescue effort would unintentionally result in greater harm.
6. Working Together with Manufacturers:
Communication between AV manufacturers and emergency responders is facilitated by protocols. Together, we can better understand the technology and any shortcomings in the system, leading to more effective solutions.
Drawbacks of Autonomous Vehicle Rescue and Emergency Response Systems
While autonomous automobile emergency response and AV Rescue protocols offer numerous advantages, they also present a few challenges and disadvantages. It is essential to consider these limits to guarantee that protocols may be periodically improved to address future difficulties. The shortcomings and challenges associated with autonomous vehicle (AV) rescue and emergency response techniques are as follows:
1. Intricacy:
Because of how quickly technology is developing, it might be challenging to design and implement criteria for autonomous vehicles. It can be difficult to guarantee responders comprehend and adjust to the complex systems of AVs.
2. Cost and Requirements for Resources:
The infrastructure required to carry out AV Rescue Protocols and the training that emergency workers need can be expensive to put up. Smaller emergency response organizations may have financial constraints.
3. Various car capacities
Responders encounter varying degrees of automation, making it challenging to evaluate the potential and limitations of every autonomous vehicle they encounter. Protocols are required to address this variability.
4. Absence of Standardization
There are few recognized norms and practices across all fields and jurisdictions. Emergency response procedures can become complicated and unproductive when there is a lack of consistency.
5. Data Privacy Issues:
Handling and gaining access to data from autonomous vehicles (AVs), which can store sensitive passenger data, presents privacy concerns. A delicate balance must be struck between the need for data in accident investigations and individuals’ right to privacy.
6. Concerns About Liability
Determining culpability in accidents involving AV can be difficult. Legal problems could arise because AV Rescue Protocols do not always provide clear guidance on how to establish culpability.
7. Quick Development of Technology:
Because AV technology advances quickly, it is easy for AV Rescue Protocols to become outdated. It could be logistically challenging for first responders and regulatory entities to maintain protocols up to date with the latest advancements.
8. Sync Up Between Stakeholders:
An efficient catastrophe response often requires coordination amongst numerous parties, including government agencies, law enforcement, manufacturers, and insurance firms. Ensuring collaboration could prove to be challenging.
Conclusion:
To sum up, AV rescue and emergency response procedures for self-driving cars are crucial to guarantee the secure and efficient incorporation of these vehicles into our transportation networks. Although these procedures have a lot to offer in terms of efficiency, safety, and public trust, there are a few drawbacks and difficulties as well.
Notable hurdles that need to be addressed are the quick development of autonomous vehicle technology, the requirement for specialized training, worries about data privacy, and problems with standards and stakeholder coordination.
Nonetheless, the advantages of well-established protocols — such as improved safety, prompt action, effective passenger rescue, and unambiguous communication — far exceed the disadvantages. These obstacles can be met by continuing development of these procedures, cooperation from emergency responders, AV manufacturers, and regulatory agencies, as well as a dedication to staying up to date with technology improvements.
Emergency response and autonomous vehicle rescue techniques are essential in the rapidly evolving field of autonomous vehicles because they guarantee that the technology is used responsibly and safely by society. To satisfy the requirements of autonomous vehicles, these protocols will keep developing and changing, advancing efficiency, safety, and trust in the age of self-driving cars.
0 notes
Text
Electronic Stability Control: How Chassis Control Ensures Safety?
July 26, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction
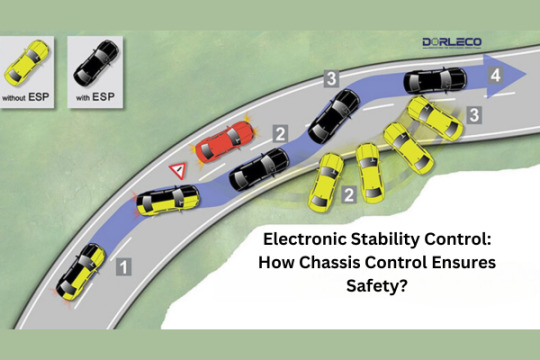
When it comes to automotive technology, safety is paramount. ESC, or electronic stability control, is one of the biggest advancements in automotive safety. This cutting-edge technology is designed to prevent skids and loss of control when driving in hazardous conditions or quickly. We will go over the concept of electronic stability control in this introduction, as well as how it effectively regulates a car’s chassis to ensure safety.
Understanding Electronic Stability Control (ESC)
Electronic stability control, sometimes referred to as ESC or ESP (Electronic Stability Program), is a state-of-the-art safety feature that is currently standard on most modern cars. Helping drivers maintain control of their vehicles is its main goal, particularly in challenging driving conditions.
Considering Vehicle Stability
Vehicle stability is necessary for safe driving. Vehicle instability can lead to hazardous situations like sliding, rollovers, or loss of control, especially in slick conditions like rain, snow, or uneven road surfaces. ESC was developed as a solution to these issues and significantly reduce the risk of accidents caused by instability.
How Electronic Stability Control Works
ESC uses a combination of sensors, microprocessors, and actuators to continuously analyze the vehicle’s behavior and adjust in real time to preserve stability. Here is how it works:
Sensor Inputs: The ESC gathers data on the mechanics of the vehicle from a range of sensors, including wheel speed, steering angle, yaw rate, and lateral acceleration. These sensors provide continuous feedback to the ESC system.

Microprocessor Analysis: The microprocessor of the ESC system continuously analyses the data from the sensors to determine whether the vehicle is deviating from the driver’s desired course. It compares the actual behavior of the vehicle with the driver’s inputs (such steering wheel position) and the planned trajectory.
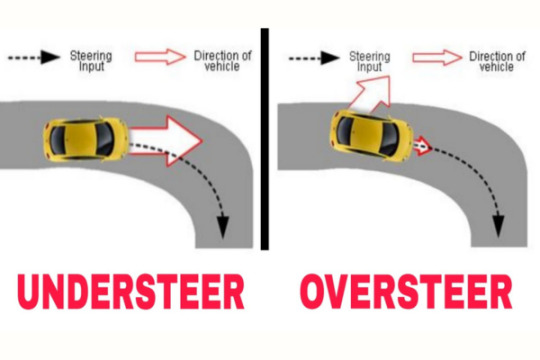
Actuator Response: If the system detects that the vehicle is beginning to skid, understeer — a situation in which the front wheels lose traction and push apart — or overseer — a situation in which the rear wheels lose traction and cause the vehicle to spin — it will take corrective action.
Restoration of Stability: ESC helps the car regain stability by adjusting the brake pressure and engine speed. This allows the driver to maintain control and steer clear of a potentially hazardous scenario. The changes occur almost instantaneously, and the driver is unaware of them.
Safety Guaranteed via Chassis Control
It takes electronic stability control to guarantee road safety. It is an essential component of the chassis control systems, which work together to provide a stable and predictable ride. The phrase “chassis control” describes a collection of technologies that help to keep drivers and passengers safe and avoid accidents, such as the Electronic Stability Control (ESC), the Traction Control System (TCS), and the Anti-lock Braking System (ABS).
Benefits of Electronic Stability Control: How Does Chassis Control Enhance Safety?
Electronic Stability Control (ESC), which has several significant advantages that improve road safety, is frequently a part of automobile chassis control systems. Some of the key advantages of ESC for ensuring safety are as follows:
Prevents Loss of Control: ESC is designed to identify and react to situations, such as sliding or skidding, where a car is in danger of losing control. By adjusting engine power and providing selective braking, ESC reduces the likelihood of accidents caused by a driver losing control of the vehicle.
Enhances Traction: On slick or uneven road surfaces, ESC can increase traction. By adjusting the engine output and braking pressure, it prevents wheel spin and holds the tires firmly on the ground. This comes in especially handy whether it’s icy, snowy, or pouring outside.
Minimizes Understeer and Oversteer: Understeer, or front-wheel slide, and oversteer, or rear-wheel skid, are common causes of accidents during rapid turns or unforeseen maneuvers. In these situations, ESC intervenes to assist the vehicle in maintaining a steady and predictable trajectory by applying the brakes to certain wheels.
Equivalents Additional Safety Systems: ESC works in tandem with Anti-lock Braking Systems (ABS) and Traction Control Systems (TCS) among other safety systems. When combined, these technologies provide extensive chassis control, making the vehicle responsive and stable in a range of driving conditions.
Reduces Rollover Risk: Electronic stability control (ESC) can also help to reduce the risk of rollovers in top-heavy vehicles such as trucks and SUVs. By preserving stability during quick turns or evasive maneuvers, ESC lowers the risk of the car overturning.
Boosts Driver Confidence: Knowing that the ESC is always monitoring and helping with vehicle stability helps boost driver confidence, especially in challenging driving circumstances. Driving habits could become safer because of this increased confidence.
Smoother Corrections: The vehicle’s behavior is rapidly and gently adjusted by the ESC. Unlike abrupt driver attempts, which can sometimes exacerbate a skid or slide, the ESC’s controlled interventions assist in preventing overcorrection and additional instability.
Electronic Stability Control Drawbacks: How Does Chassis Control Guarantee Safety?
While Electronic Stability Control (ESC) has significantly improved vehicle stability and reduced the risk of collisions, it is important to consider some of its possible limitations and drawbacks:
Cost: ESC is an expensive technology that requires certain actuators, sensors, and microprocessors. As a result, it might make producing and purchasing a car more expensive, which might raise the price of cars with ESC.
Maintenance costs: An ESC may need to be maintained and repaired on occasion, just like any other electrical device. The cost of identifying and fixing issues that develop from malfunctioning ESC system components may be substantial.
False Alarms: ESC systems can sometimes misinterpret the driving environment and initiate interventions when they are not necessary. These false alerts might irritate the motorist and cause a momentary loss of power or control.
Driver Overreliance: Some drivers may become too reliant on the ESC because they mistakenly believe that it will make up for unsafe driving habits. While ESC can sometimes alleviate some situations, driving must still be done with caution and attention.

Limited Effectiveness in Some Terrains: While ESC does a great job on standard highways, it might not work as well in off-road or difficult terrain. Drivers should proceed with caution in these circumstances as the ESC may struggle to keep control.
Tire Wear: ESC interventions may cause tires to wear down more quickly, especially when driving hard or regularly. The cost of operating the car may increase because of having to fix tires more frequently.
Not a Winter Tire Replacement: Not a Winter Tire Substitute Even though ESC can help with control in icy or snowy conditions, winter tires are still required. Nonetheless, drivers in regions with harsh winters should equip their vehicles with the appropriate tires for optimal safety.
Conclusion:
To sum up, Electronic Stability Control (ESC) is a significant technological development in the field of vehicle safety since it is essential to the way chassis control maintains road safety. This technology has completely changed how cars react to changing road conditions and handle them, greatly lowering the chance of collisions brought on by skidding, losing control, or bad weather. Many benefits are provided by ESC, such as preventing loss of control, improving traction, reducing oversteer and understeer, and coordinating with other safety systems.
The possible drawbacks and restrictions of ESC, such as expense, upkeep, sporadic false alarms, and the possibility of driver overreliance, must be acknowledged, though. Technology should be used sensibly and intelligently to mitigate these shortcomings.
Notwithstanding these factors, ESC continues to be a vital component of contemporary car safety, serving as an example of how advanced chassis control systems enhance traffic safety. ESC will surely continue to save lives and improve the safety of drivers, passengers, and pedestrians as it develops and becomes standard in a growing number of vehicles.
1 note
·
View note
Text
Predictive Maintenance and eMobility Controls
July 25, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction

Predictive Maintenance:
Using data, advanced analytics, and machine learning, predictive maintenance is a proactive approach to equipment and machinery maintenance that foresees when repair is necessary before a failure occurs. It aims to minimize unplanned downtime, reduce maintenance costs, and optimize asset performance across a range of industries, including manufacturing, energy, transportation, and more.
Predictive maintenance’s essential elements include:
Data collection: Sensors, Internet of Things (IoT) devices, and other data sources capture real-time data about machinery and equipment, such as temperature, vibration, pressure, and usage trends.
Data analytics: To find patterns, anomalies, and potential problems in the gathered data, machine learning algorithms and advanced analytics technologies are employed. These algorithms can forecast when a piece of equipment will break or need maintenance.
Condition monitoring: By keeping a close eye on the equipment’s condition, maintenance personnel can spot problems early and take appropriate measures to prevent a breakdown.
Predictive alarms: Alerts and messages are sent out when analytics indicate that upkeep or repairs are necessary. These alerts can help with the prioritization and scheduling of maintenance tasks.
Maintenance Planning: By using forecasts and alerts, teams may schedule maintenance operations more efficiently, reducing downtime and avoiding costly emergency repairs.
Predictive maintenance advantages include:
Decreased Downtime: By resolving problems before they become failures, unexpected downtime is decreased. Improves maintenance schedules and lessens the need for needless planned maintenance. financial savings.
Extended Equipment Lifespan: Preventing problems before they get worse helps extend the life of equipment reduces the likelihood of device failure, improving safety.
Data-Driven Decision-Making: Makes data-driven decisions and resource allocation easier.
eMobility Controls:

In the realm of electric mobility, advanced electronic systems and software, also referred to as “eMobility controls,” oversee and regulate electric cars (EVs) and the infrastructure necessary for charging them. eMobility controls play a major role in the effective operation and pleasant user experience of electric cars and charging stations.
Important elements of eMobility controllers consist of:
Battery management involves keeping an eye on and controlling the battery’s health, temperature, and level of charge to get the most out of it and extend its life.
Infrastructure for managing the charging process, including grid integration, billing, and authentication, for fast chargers, home chargers, and public charging stations.
Energy Management: Energy management is the process of matching the grid’s capacity during periods of peak demand with the energy requirements of EVs.
Vehicle Control: Vehicle control refers to managing a vehicle’s torque and power distribution to improve efficiency, performance, and security.
User Interface: Using touchscreens or smartphone apps to provide drivers with simple interfaces to monitor and control charging, battery life, and other vehicle functions.
eMobility Controls Benefits:
Range optimization: Extends the driving range of electric cars through efficient energy management. Easy access to charging for electric vehicle owners is ensured by convenient charging.
Grid Integration: By incorporating EVs into the electrical system, grid stability is supported, and the overall carbon impact is reduced.

Savings: Reduces energy use and costs associated with charging for both car owners and chargers.
Environmental Benefits: Reduces greenhouse gas emissions by promoting the use of electric vehicles.
Predictive Maintenance Benefits:
Decreased Downtime: By foreseeing potential equipment problems before they arise, predictive maintenance helps to reduce unscheduled downtime. As a result, productivity and operational effectiveness increase.
Cost savings: By proactively addressing maintenance issues and avoiding emergency repairs, organizations can significantly reduce their maintenance expenses. Predictive maintenance optimizes maintenance schedules while reducing labor expenses and inventory of spare parts.
Extended Equipment Lifespan: Equipment and other assets can have their lives extended by timely maintenance and early problem detection. Consequently, companies may reap greater rewards from their financial investments.
Data-Driven Decision-Making: Predictive maintenance makes use of machine learning and data analytics to determine when and how to do maintenance. This data-driven approach results in the production of better plans. Because there are fewer unplanned breakdowns and more chances that the equipment will function when needed, equipment availability is raised and overall operational continuity is improved.
Improved Customer Satisfaction: In companies where downtime can affect customer services, predictive maintenance gives customers a more seamless and dependable experience.
Improved Resource Allocation: Maintenance teams can focus their resources more efficiently by focusing on the equipment that need maintenance the most, as opposed to following a standard plan for all assets.
Benefits of Electronic Mobility Controls:
Range Optimization: eMobility controls reduce “range anxiety” for drivers by enhancing energy efficiency and allowing electric vehicles (EVs) to travel farther between charges.
Convenient charging: With real-time status information, payment processing, and scheduling, the eMobility controls-managed charging infrastructure offers EV users a convenient and easy-to-use experience.
Grid Integration: Smart charging and load management for electric vehicles (EVs) are made possible by eMobility controllers, which facilitate the integration of EVs into the power grid. This balances energy consumption, lowers peak loads, and improves grid stability.
Savings: Compared to owners of traditional gasoline-powered cars, owners of electric vehicles can have lower running costs because of the lower cost of electricity and less maintenance requirements.
Environmental Benefits: Electric vehicles produce no exhaust emissions, which lowers air pollution and reduces their carbon footprint. This is made possible by contemporary eMobility technology.
Data insights: eMobility controls collect data on usage patterns, charging habits, and energy consumption. This information is then used by service providers and customers to optimize operations and make informed decisions.
Predictive maintenance’s drawbacks
Although predictive maintenance and eMobility controls offer numerous advantages, there may also be certain disadvantages and challenges. Some drawbacks of these technologies are as follows:
Cons of Predictive Maintenance:
Implementation Costs: Since deploying sensors, constructing a data gathering infrastructure, and developing predictive analytics skills are all necessary when putting up a predictive maintenance system, implementation costs might be substantial.
Data Availability and Accuracy: Timely and accurate data are necessary for predictive maintenance. Low data quality or limited data sources may make predictive maintenance less effective.
Training and Skill Requirements: For maintenance personnel to deploy predictive maintenance systems and correctly interpret the data, organizations must invest in their training and upskilling.
False Alarms: Predictive maintenance systems have the potential to generate erroneous forecasts or alerts, leading to unnecessary maintenance and related costs.
Integration challenges: It can be challenging to integrate predictive maintenance systems with existing equipment and practices, and it could be necessary to make significant changes to the way work is currently done.
Disadvantages of eMobility Controls:
Costs of Infrastructure: Infrastructure-related costs: Both the construction and upkeep of a public infrastructure and a fast-charging infrastructure for electric vehicles can be expensive.
Limited Infrastructure for Charging: In certain places, the scarcity of charging stations — especially fast chargers — may cause annoyances for electric vehicle (EV) owners.
Grid Load: In certain places, the quick uptake of EVs may impose undue strain on the grid, requiring costly adjustments to accommodate the growing demand.
Range Anxiety: Because certain electric vehicles have lesser ranges than cars with internal combustion engines, some drivers may still experience range anxiety even though eMobility features aid maximize energy use.
Limited Model Options: In certain markets, there may be fewer options for electric vehicle models than for conventional cars, which reduces buyer choice.
Energy Source: The environmental benefits of electric vehicles are influenced by the source of the electricity used for charging. If fossil fuels are used to create the electricity, the number of emissions that can be reduced could be limited.

Conclusion:
In conclusion, two revolutionary technologies that are changing how businesses manage assets, and the transportation sector functions are predictive maintenance and eMobility controls. While they both have a lot going for them, there are certain difficulties and things to keep in mind.
Utilizing data analytics and machine learning, predictive maintenance lowers downtime, saves money, and enhances safety by anticipating and averting equipment breakdowns. But in order to be successful, it needs competent staff and high-quality data, which can be expensive to deploy.
Future sustainable mobility and the shift to electric cars (EVs) depend heavily on eMobility controls. They provide advantages like lower operating costs and less environmental impact by optimizing range, charging convenience, and grid integration. However, there are still obstacles to overcome, such as the upfront cost of EVs, grid compatibility, and the expense of developing charging infrastructure.
Both technologies rely on advanced analytics and data to boost productivity, cut expenses, and boost overall performance. Additionally, they both aim to advance sustainability and lessen the environmental impact of transportation and industry.
The drawbacks of eMobility controls and predictive maintenance are anticipated to gradually lessen as governments, corporations, and consumers adopt these innovations and technology advances. In the end, these technologies are vital forces behind sustainability, efficiency, and safety, opening the door to a more intelligent, connected, and environmentally conscious future. When making choices about eMobility control systems and predictive maintenance, both individuals and organizations should weigh the advantages and disadvantages of these technologies.
#emobilitycontrols#predictivemaintenance#VCU#ProgrammableVCU#VCUSupplier#VCUServices#autonomousvehicle
0 notes
Text
Simulink-based software
July 22, 2024
by dorleco
with no comment
Control Systems
Edit
Introduction

Dynamic systems with various domains are modeled, simulated, and analyzed using the Simulink graphical programming environment. It is widely used for system design and simulation in numerous engineering disciplines, such as communications, signal processing, control systems, and more. Math Works creates it. Simulink-based software is highly popular in industries such as industrial automation, aerospace, and automotive.
Important characteristics of Simulink-based software are as follows:
Model-Based Design (MBD): Using Simulink’s model-based design technique, engineers can create a visual representation of the system they are building. This model could incorporate all of the system’s components, interactions, and operations.
Simulink uses a block diagram environment, where various system components are represented as blocks and the connections between the blocks explain how the blocks interact. Every block can represent a mathematical operation, a state machine, or a transfer function.
Library of Blocks: Users can drag and drop a sizable number of pre-made Simulink blocks into their models. The different mathematical processes, signals, sensors, actuators, and other parts that are frequently found in engineering systems are represented by these blocks.
Analysis and Simulation: With Simulink, users may simulate the behavior of their models in different situations. Before putting a design into hardware, engineers can assess how the system behaves, identify any issues, and improve the design. Simulink has an automatic code generation feature that lets users generate code in formats like as C or HDL directly from their models. This facilitates the transition from hardware platform implementation to simulation.
Integration with MATLAB: MathWorks also closely collaborated with Simulink to build MATLAB, a high-level programming language and environment. Users can use this interface to combine MATLAB’s computational capability and Simulink’s modeling features for mathematical calculations. Simulink enables engineers to link their models to hardware-in-the-loop (HIL) systems for testing and verification through real-time simulation.

Toolbox Support: Simulink-based software comes with several toolboxes that extend its capabilities for specific uses, such as image processing, control system design, signal processing, and more.
Customization and Extensibility: Users can construct their blocks and functions to customize Simulink’s functionality to meet their own needs. Modeling and simulation can therefore be extensively tailored.
Drawbacks of simulink-based software
While there are many advantages to utilizing Simulink for modeling and simulating dynamic systems, there can also be some drawbacks and challenges. When considering if Simulink is the ideal tool for a certain application, it’s important to consider the following factors:
Complexity and Learning Curve: Simulink could be hard for inexperienced users to understand, and there might be a learning curve to unlock all of its features. Users who are not familiar with the software may find it challenging to create and modify models effectively.
Resource-intensive: Large-scale, complex model simulation in Simulink can be a resource-intensive operation that requires a lot of RAM and computing resources. This may lead to longer simulation times and potential issues running simulations on less powerful systems.
Limited Support for Text-Based Programming: Simulink is a terrific tool for graphical modeling, but users who want a more text-based programming approach may find it to be less suitable than other options. The emphasis is on graphical modeling, however Simulink models can also be used in conjunction with MATLAB scripts.
Version Compatibility: Users may encounter compatibility issues when attempting to interact with models created in different Simulink versions. Ensuring that all team members are using the same or compatible version is essential to avoid compatibility problems.
Cost of Licenses: Simulink is a commercial program, and obtaining a license for both Simulink and MATLAB can be expensive. This cost component could be prohibitive, especially for new businesses, small enterprises, or budget-conscious educational institutions.
Problems with Code Generation: While code generated automatically is a useful tool, it may not always follow certain coding guidelines or may require further manual tweaks. To make sure that the final code meets project requirements, extra work could be needed.
Limited Hardware Support: Simulink enables hardware-in-the-loop (HIL) setups for real-time simulation, although it might only support a limited number of hardware platforms. Compatibility issues could arise with particular hardware. Modeling Some System Aspects Can Be Difficult: Simulink can be a modeling difficulty, especially when dealing with complex or non-linear behavior. Users may need to utilize other modeling methodologies or workarounds to resolve these concerns.
Model Maintenance: Large and complex models can become challenging to update and maintain over time. The model’s complexity needs to be carefully controlled because changes to one part could have unexpected consequences in other parts.
Conclusion:
To sum up, Simulink-based software provides a strong and adaptable platform for dynamic system modeling, simulation, and analysis in a variety of engineering areas. For engineers and researchers active in system design and analysis, its graphical block diagram approach, interaction with MATLAB, and a large library of preconfigured blocks make it a popular choice.
Model-based design, fast prototyping, automated code generation, and real-time simulation are some of Simulink’s advantages. The capacity to model intricate systems, model their behavior under many scenarios, and produce a code of production quality expedites the development process and promotes effective cooperation amongst interdisciplinary teams.
It’s crucial to take into account any potential disadvantages, though, like the learning curve for inexperienced users, simulations requiring a lot of resources, and possible difficulties with code development and model maintenance. In addition, while determining if Simulink is appropriate for a certain project, consideration should be given to the cost of licensing and the requirement for compatible software versions.
Notwithstanding these difficulties, Simulink is still a useful tool for many different kinds of applications, such as signal processing and control system design. Because of its adaptability, wide range of toolbox support, and customization possibilities, it is widely used in industry and academics for both practical engineering projects and educational purposes. Simulink-based software should ultimately be chosen after carefully weighing its advantages, disadvantages, and any restrictions on the demands of the particular project.
#autonomousvehicle#Simulink#Software#VCU#VCUSupplier#Dorleco#Automation#Microcontrollers#programmableVCU
1 note
·
View note
Text
What is the driving range of an electric vehicle on a single charge?
July 19, 2024
by dorleco
with no comment
Others
Edit
Introduction

Driving range of an electric vehicle
Electric vehicles (EVs) have become more and more popular in recent years due to their environmental friendliness and energy efficiency. Unlike traditional gasoline-powered vehicles, electric vehicles (EVs) employ battery-operated electric motors to generate power and propel the vehicle.
One of the most common concerns among potential EV buyers is an electric vehicle’s driving range or the distance an EV can travel on a single charge.
The driving range of an electric vehicle is mostly dependent on its specific brand and model as well as other factors including weather, driving conditions, and driving style.
This article’s objective is to examine the factors that affect an electric vehicle’s driving range.
How much distance can an electric vehicle cover on a single charge?
The driving range of an electric vehicle (EV) is determined by several factors, including the battery capacity, the kind of EV, topography, weather, and driving speed.
The battery capacity determines how much energy can be stored and used to power the vehicle. An electric vehicle’s driving range often grows as its battery capacity does.
The range of an electric automobile is affected by topography and driving speed since they change the amount of energy required to drive the vehicle. The driving range may be shortened by the energy needed for faster and hillier terrain.

The driving range of an electric vehicle is expanding due to advancements in battery technology and an increase in the number of charging stations. Considering that many contemporary EV vehicles can already go more than 200 miles between charges, long-distance driving is becoming more practical.
Variables That Could Impact the Range of an EV
Capacity of the battery: The size and capacity of the battery pack determine how much energy can be stored and used to power the vehicle. Longer driving ranges are usually found in EVs with larger battery packs.
Driving procedures: Frequently applying force when braking, accelerating rapidly, and driving aggressively can all reduce the range of an electric car. Regenerative braking can be used in conjunction with steady speed to extend the driving range.
Driving conditions: An EV’s range can be significantly impacted by several factors, including speed, topography, and weather. Extreme temperatures, steep terrain, and rapid speeds can all shorten the driving range.
Climate control: If an electric car relies on battery power to heat or cool the interior, its driving range may be reduced. Use the climate control sparingly to maximize the range.
Payload: Adding more weight to an electric vehicle (EV), such as passengers or freight, can reduce the vehicle’s operating range.
Route planning: By arranging the route and charging stations ahead of time, it is possible to guarantee that an EV will have enough range to arrive at its destination. By being informed of the locations and recharge periods of charging stations, range anxiety can be prevented.
How Can the Range of an EV Be Determined?
One can compute the range of an electric vehicle (EV) using many techniques, including:
1. Manufacturer specifications: Occasionally, an estimate of an electric vehicle’s driving range on a single charge is mentioned in the manufacturer’s specifications. It’s important to keep in mind that this estimate may not precisely reflect driving conditions in the real world because it is typically based on standardized testing.
2. In-Car Display: A common feature of many electric cars is a display that shows the estimated range based on the driving circumstances at the time and the amount of battery charge left. To find out how long the automobile will run before needing to be recharged, can be a helpful tool.
3. Mobile Apps: Some EVs come with a smartphone app that provides owners with real-time information on the battery’s range, charge level, and nearby charging station locations.
4. Online Range Calculators: Several online range calculators that ask for information on temperature, terrain, and driving speed can be used to estimate an EV’s range in a variety of scenarios.
5. Test Drive: The best way to determine an EV’s range is to take it for a test drive. Throughout the test drive, you may monitor the battery’s remaining charge and estimate its range based on your driving style and the state of the road.
It’s important to keep in mind that an EV’s range may vary depending on several factors, including topography, driving style, weather, and more.
Understanding an EV’s range and limitations is essential to reducing range anxiety and ensuring the vehicle meets your needs when driving.
Is Driving an Electric Vehicle to Empty Safe?
While it is generally safe to drive an electric vehicle (EV) until the battery is very low or even empty, doing so regularly is not recommended. This explains why:
Battery Life: As long as the lithium-ion batteries in EVs are not completely exhausted, they should last longer. Driving an electric car frequently until the battery is almost depleted will limit its lifespan.
2. Range Anxiety: Those who frequently drive electric cars (EVs) until they are nearly empty suffer from this fear of not being able to get to a charging station before the battery runs completely flat.
3. Reduced Performance: When the battery is very low in charge, the EV’s acceleration and top speed may be impacted. This could be dangerous for your safety, especially in an emergency.
4. Electrical Components: An electric vehicle’s (EV) power electronics and motor may be subjected to additional strain when it is driven empty.
Conclusion:
In conclusion, a variety of factors, including the vehicle’s make and model, battery size and capacity, driving style, topography, environment, and more, may affect an electric vehicle’s operating range.
While some electric vehicles (EVs) may travel over 300 miles on a single charge, others have a range of less than 100 miles.
It is essential to understand the capabilities and range of an EV before making a purchase. To reduce range anxiety, you should also schedule your excursions to accommodate charging breaks.
Additionally, an EV battery’s lifespan will be shortened if it is routinely drained to extremely low levels, hence it is recommended to constantly keep the battery level above 20%.
As battery technology develops, it is expected that the range of EVs will increase, making them a more attractive and practical option for drivers.
FAQ:
1. How far does an ideal electric vehicle go?
The ideal driving range of an electric vehicle (EV) is greatly influenced by the needs and driving behaviors of the driver.
However many drivers consider a minimum of 200 miles on a single charge to be the ideal range because it allows for extended travel without the need to stop and recharge.
2. The increasing range of EVs
The driving range of an electric vehicle(EVs) has been steadily increasing in recent years; some versions can already travel over 300 miles on a single charge.
This trend is expected to continue as battery technology develops, increasing the attraction and viability of EVs as a vehicle option for drivers.
#autonomousvehicle#drivingrange#EVs#VCU#VCUSupplier#Dorleco#Automation#Microcontrollers#programmableVCU
0 notes
Text
Autonomous Vehicle Control
July 18, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction
Self-driving automobiles, sometimes referred to as autonomous vehicles, are a cutting-edge technological advancement that could revolutionize our daily lives and modes of transportation. These cars mimic a human driver’s decision-making process by using sensors, software, and control systems to make real-time decisions. They are designed to function alone and navigate. This introduction will examine the fundamental concepts and components of autonomous vehicle control.
1. Sensors

Lidar: Laser-based sensors that create accurate three-dimensional images of an object’s surroundings when it moves.
Radar: Radar uses radio waves to calculate the relative speed and distance of an object.
Cameras: Make use of cameras to capture images and videos that help identify lane markers, traffic signs, and other cars.
Ultrasonic sensors: Use them to find objects nearby to aid with parking and slow-moving situations.
GPS: Provides location information and facilitates navigation.
2. Control systems:
Autonomous Vehicle Control depends on sophisticated control systems to make decisions in real time. These systems perform control functions for the vehicle, including steering, braking, acceleration, and more, by analyzing sensor data. Safe and efficient driving is ensured by control algorithms, even in complex and dynamic environments.
3. Perception and Mapping:
Perception algorithms facilitate the car’s comprehension of its environment. They recognize objects, predict their movements, and assess the risks. Concurrently, mapping software creates up-to-date, precise maps of the road network to aid with vehicle navigation.
4. Place-Based:
Autonomous cars need to know where they are at all times. GPS alone is not sufficient for this. Advanced systems such as Simultaneous Localization and Mapping (SLAM) let vehicles maintain precise positioning by combining map information and sensor data.
5. Coming to a Decision:
The brain of the autonomous vehicle consists of its decision-making algorithms. They look at sensor data, traffic conditions, and route information to determine when to change lanes when to stop at a traffic signal, and how to avoid obstructions. These algorithms need to put safety first while accounting for other factors like passenger preferences and traffic laws.
6 . Redundancy and Safety:
Autonomous Vehicle Control safety is a critical concern. These vehicles are designed with multiple layers of redundancy, including backup sensors and control systems, to mitigate the consequences of component failures. To make sure they adhere to strict safety regulations, they also undergo extensive testing and validation.
7. Difficulties and Moral Issues:
The development and application of autonomous vehicles face several challenges, including ethical and legal ones. For example, figuring out who is at fault in an autonomous vehicle accident remains challenging. It is also debatable how, in morally questionable situations, these cars should put safety first.
Benefits of Driverless Vehicles
Autonomous vehicle control has many potential benefits that could completely change our perspective on transportation. The following are a few of the primary advantages of autonomous vehicles:
Safety Improvement:
Autonomous cars have the potential to significantly reduce traffic accidents. The majority of accidents are the result of human error, such as inattentive driving or bad judgment. The capacity of autonomous automobiles to follow traffic laws and make decisions based on sensor data may make roads safer.
Reduction of Traffic Jams:

Enhanced fuel efficiency:
Autonomous vehicles consume less fuel overall because they can optimize their driving behaviors and speeds. By doing this, greenhouse gas emissions and the general harm that transportation does to the environment can be reduced.
Enhanced Mobility for the Elderly and Disabled:
Autonomous cars may provide a new level of mobility to people who are unable to drive because of age- or disability-related limitations. This could enhance their level of independence and well-being.
Enhanced Productivity and Leisure Time:
By enhancing their productivity and leisure time, passengers in autonomous vehicles can make better use of their travel time. The passengers can work, read, or have fun while the car is moving. This could increase overall productivity and reduce stress from the journey.
Decreased Parking Demand:
Autonomous vehicles’ capacity to pick up passengers and park in more convenient or far-off locales can reduce the demand for premium parking spots in urban areas. This could lead to a decreased requirement for parking infrastructure and improved area utilization.
Savings:
The cost of transportation as a whole could be reduced by autonomous vehicles. People can now choose on-demand transportation over owning a personal vehicle, saving money on expenses like fuel, insurance, and maintenance, thanks to autonomous ride-sharing services.
Drawbacks of Driverless Transportation
While there is much promise for autonomous car technology, there are several potential risks and challenges as well. Some disadvantages and problems with autonomous vehicle control are as follows:
Limitations of the technology:
Autonomous car technology is continuously evolving and not perfect. They might struggle to operate in inclement weather, deal with unforeseen situations, or recognize objects like bicyclists and pedestrians.
High Development Costs:
It will cost a lot of money to develop and test autonomous car technology. These costs could drive up the cost of vehicles by making the technology unaffordable for smaller enterprises.
Cyber security Risks:
Autonomous vehicles are susceptible to hacking and other internet threats because they rely so heavily on software and communication. A successful attack might compromise vehicle security and privacy.
Data privacy issues:
Autonomous vehicles gather a lot of information about their environment, passengers, and driving habits. There are worries about how this data is handled, used, and protected because it may violate people’s right to privacy.
Liability and Legal Concerns:
Establishing culpability in an autonomous vehicle collision can be challenging. Who is at fault — the vehicle’s manufacturer, the owner, or the software developer? Resolving these legal issues might be challenging.
Employment displacement:
As autonomous cars become more common, employment in transportation-related industries like trucking and taxi services may decline. There could be social and economic repercussions from this.
Ethical Conundrums:

Regulatory Difficulties:
Developing comprehensive legislation for autonomous vehicles is a challenging and drawn-out process. Varied regions and countries have varied rules and regulations, which could lead to discrepancies and possible adoption hurdles.
Conclusion:
In conclusion, the development of autonomous vehicle control has great promise for changing the way we think about transportation. The high level of autonomy that autonomous vehicles can operate at thanks to the integration of sensors, advanced software, and control systems presents several potential advantages. A few of these advantages are better safety, less traffic, more fuel efficiency, better mobility for the old and disabled, more productivity when traveling, and other economic and environmental savings.
Nonetheless, it’s critical to recognize the difficulties and worries related to autonomous vehicles. Technological constraints, exorbitant development expenses, cyber security threats, privacy issues regarding data, legal and liability complications, the possibility of job displacement, moral conundrums, and regulatory intricacies are all included in this list of challenges. In addition, discrepancies in accessibility, customer trust, and infrastructure adaption need to be taken into account.
It’s crucial to find a balance between tackling the problems that come with autonomous vehicles and maximizing their potential advantages as research and development go forward. To fully realize the potential of autonomous vehicle control, careful regulation, continuous research and development, and a strong commitment to safety and ethical issues are essential. Though the route to completely autonomous vehicles may be convoluted, it offers the prospect of future mobility that is safer, more effective, and more easily available.
#autonomousvehicle#controlsystem#VCU#VCUSupplier#Dorleco#Automation#Microcontrollers#programmableVCU
0 notes
Text
Control engineering overview
July 17, 2024
by dorleco
with no comment
Control Systems
Edit
Introduction

Control engineering is a branch that deals with designing, creating, and utilizing systems that manage or regulate other systems. The primary goal is to adjust a system’s inputs so that it operates as intended. This field is essential to several industries, including manufacturing, aerospace, robotics, and automobiles.
An outline of the main ideas in control engineering is provided here:
System of Control:
A control system’s constituent parts work together to maintain the intended reaction or output. It is made up of sensors, actuators, a controller, and the system itself.
Types of control engineering Systems:
A control system operating in an open loop does not feedback to its output to its input. The system is dependent on an initial set of conditions rather than being able to adjust to changes.
Closed-Loop Control System (Feedback Control System): The output is compared to the desired reference signal, and the error (difference) is used as a guide to modify the behavior of the system.
Components of a Control System:

Transducer/sensor: Ascertains the system’s performance or output.
Controller: Chooses the necessary actions to maintain or achieve the desired outcome.
Actuator: Modifies the system by implementing the control signals generated by the controller.
Control Techniques:
PID control is a well-liked control strategy that adjusts the control effort based on the derivative, integral, and proportional terms of the error signal.
Optimal Control: Uses mathematical optimization techniques to determine the optimal control inputs.
Adaptive control modifies the controller’s parameters in response to changes in the system’s dynamics.
Stability and Performance:
Stability: A stable system returns to its intended state following a disturbance.
Performance: This is the extent to which the control system achieves its goals while accounting for factors such as response speed, precision, and robustness.
Applications:
Industrial automation: Controlling manufacturing processes to guarantee efficiency and excellence.
Systems seen in cars and airplanes include flight control, cruise control, and others.
In robotics, trajectory planning, and motion control.
Biomedical systems include, for example, drug distribution and patient monitoring systems.
Systems of Digital Control:
Digital Control Systems: (DCP) is the study and use of digital signal processing in control systems. Microcontrollers and PLCs are common platforms for implementing digital control systems.
Modeling & Simulating:
Numerical Models: Utilize mathematical formulas to illustrate how the system behaves.
The process of utilizing models to forecast and examine how a system will respond to different inputs or disturbances is known as simulation.
Human-Machine Interface (HMI):

Advantages of Control Engineering
Control engineering offers several advantages in a variety of fields and applications. Here are a few key advantages:
Enhanced Effectiveness:
Control systems enhance operations and processes, leading to increased efficiency in industries such as manufacturing, where precise supervision of machinery and production methods is critical.
Improved Productivity:
Control systems can enhance system performance by managing variables and ensuring that they follow predetermined guidelines. This is critical in domains such as robots, aerospace, and automotive systems.
Regularity and Excellence:
Control engineering helps to ensure that procedures are properly regulated, which helps to produce high-quality products consistently. This is crucial for sectors that have tight standards for the quality of their products.
Diminished Human Error:
Automated control systems contribute to a reduction in the likelihood of human mistakes by eliminating the need for human involvement. This is especially important for critical systems like medical equipment and nuclear power facilities.
Enhanced Safety:
To protect operations and users, control systems are used in numerous safety-critical applications, such as emergency shutdown systems in chemical plants and anti-lock brake systems in automobiles.
Resource Optimization:
Utilizing raw materials, energy, and time efficiently is made feasible by control engineering. This could lead to cost savings and a more resource-sustainable use of resources.
Adaptability and Flexibility:
Systems can deal with dynamic situations with greater flexibility thanks to adaptive control strategies, which allow them to adjust to changing environmental or operating variables.
Remote Management and Observation:
Through the integration of communication technologies, control engineering makes remote system monitoring and control possible. This is useful for applications such as distant industrial operations and unmanned vehicles.
Correctness & Dexterity:
Control systems provide the ability to accurately control parameters, resulting in accurate and consistent outputs. This is significant for uses like laboratory equipment where accuracy is essential.
Efficiency of Energy:
Control engineering makes a substantial contribution to greater energy efficiency by optimizing system operations and reducing unnecessary energy consumption. This is especially important now that sustainable practices are emphasized.
Quick Reaction to Unrest:
Control systems must be able to respond quickly to system changes or interruptions to maintain stability and performance. For systems that must react quickly, like flight control systems in aircraft, this is essential.
Fault Detection and Advanced Diagnostics:
The real-time fault detection and diagnosis capabilities of control engineering enable proactive maintenance and decreased downtime.
Controls engineering drawbacks
Control engineering has numerous advantages, but it also has challenges and disadvantages. A few drawbacks of the control system are as follows:
Intricacy
Control systems can be very complex, especially in large-scale industrial applications. Specialized knowledge and experience are required for the design, implementation, and maintenance of complex control systems.
High initial cost:
There may be significant up-front expenses associated with the installation, software, and hardware of control systems. This could be a barrier for smaller businesses or industries with more constrained expenditures.
Challenges with Maintenance:
Control systems require routine maintenance to ensure proper operation. The need for skilled workers and the potential for downtime during maintenance can be challenging for many sectors.
Vulnerability to Dangers to Cyber security:
Control systems become more vulnerable to cyber security threats as digital technologies are integrated into systems more and more. Manipulation of control systems or unauthorized access can have negative consequences, especially in critical infrastructure.
Restricted Capability to Adjust:
A significant change in the operating environment may make it challenging for certain control systems to adapt. This lack of adaptability may be detrimental in fields that see rapid change.
Dependency on Technology:
The performance and dependability of the underlying technology affect the efficacy of control systems. The control process may be hampered by problems or failures with the hardware or software.
Absence of Intuition:
Control systems typically operate on mathematical models and algorithms. They may not always have the same intuition or ability to make decisions as human operators, even if they are extremely accurate.
Qualifications and Experience:
Control system design, implementation, and maintenance require specialized knowledge and abilities. Since there can be a labor scarcity, it’s important to continue learning to stay current with industry improvements.
Over-reliance on Automation:
Unintentional Repercussions:
Sometimes modifications to the system or adjustments to the control parameters can have unintended consequences. Engineers must thoroughly assess any potential negative effects and carry out rigorous testing before adopting modifications.
A Legal and Ethical Perspective:
Control systems present moral and legal challenges, particularly in the domains of robots and autonomous vehicles. Issues with culpability, responsibility, and emergency decision-making must be addressed.
Challenges with System Modelling:
Creating an accurate model of complex systems can be challenging. Inaccurate models could lead to less-than-ideal control strategies or unexpected system behavior.
Conclusion:
Finally, it should be noted that control engineering is an important field with many applications ranging from manufacturing to robots and aerospace. This field uses automation technologies, feedback mechanisms, and sophisticated control strategies to shape systems' efficiency, safety, and dependability.
Enhancing performance, increasing efficiency, and improving quality are just a few of the ways that control engineering benefits numerous operations. Control engineering enhances the overall flexibility and adaptability of systems, minimizes human error, and maximizes resource usage through precise variable regulation. Furthermore, it is essential to attain energy efficiency, which is a major concern when it comes to sustainable practices.
The control system is not without its difficulties, though. Implementation is hampered by the complexity of control systems, high upfront expenditures, and the requirement for specialist skills, particularly for smaller enterprises. The issues faced by the field are further compounded by the need for maintenance, vulnerability to cyber security threats, and potential difficulty in adjusting to changes in the operational environment.
It is conceivable that control engineering will change as technology advances. The way that artificial intelligence, machine learning, and digital technologies are integrated will continue to influence control system development. The success and further growth of the control system will depend on how well it handles issues like threats to cyber security, adapts to changing surroundings, and strikes a balance between automation and human monitoring.
Fundamentally, control engineering is still at the front of innovation, spearheading developments that affect entire sectors of the economy and society. The continuous endeavor to achieve accuracy, dependability, and effectiveness in control systems highlights the significance of this domain in molding the forthcoming technology and engineering.
1 note
·
View note
Text
Motor control technology
July 16, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

The application of different methods and technologies to coordinate and guide the operation of motors is known as motor control technology. Motors transform electrical energy into mechanical motion. They are extensively utilized in many different industries, including robotics, automotive systems, home appliances, and industrial gear. For motors to operate precisely, effectively, and safely in a variety of situations, motor control technology is essential. Several noteworthy facets of motor control technology include the following:
1. Motor controllers:
Microcontrollers and microprocessors, which execute control algorithms, interpret feedback, and generate signals that move the motor, are the brains behind motor control systems.
In motor control applications, digital signal processors, or DSPs, are widely used to interpret signals in real time and enable faster, more accurate control.
2. Algorithms for Control:
PID Management: A popular algorithm for controlling a motor’s speed, position, or torque is proportional-integral-derivative (PID) control. It adjusts control parameters based on the difference between the desired and actual values.
FOC, or field-oriented control: FOC is widely used in AC motor control to independently manage the torque and flux components to increase performance and efficiency.
3. Sensors:
· Encoders: These devices provide information about the motor’s location, allowing for precise position tracking and control.
· Hall Effect Sensors: These sensors monitor the position of the rotor and turn on the motor windings in brushless DC motors.
4. Electronic Drives:
· Inverters: These devices control the output voltage and frequency while transforming DC power into AC electricity for AC motors.
· Amplifiers: Increase the control signals from the controller to the power levels required by the motor.
5. Protocols for Communication:

· Ethernet and Wireless Communication: These technologies, which offer advantages like remote monitoring and control, enable communication in networked systems.
6. Power Electronics:
· Power Factor Correction (PFC): Improves the energy efficiency and power factor of the motor control system.
· Variable frequency drives (VFD) and soft starts: By enabling motors to accelerate and decelerate under control, VFDs and soft starters reduce mechanical stress and energy consumption.
7. Enhanced Features:
Regenerative braking allows the motor to act as a generator by recovering energy during braking and transferring it back into the power source.
By employing sensors and data analytics to detect possible motor breakdowns, predictive maintenance enables proactive maintenance.
8. Industry 4.0 integrating IoT:
· IoT Connectivity: By connecting motor control systems to the Internet of Things (IoT), it is possible to diagnose, monitor, and control them from a distance.
· Data analytics: Motor performance optimization, efficiency increase, and predictive maintenance.
The advantages of motor control technology
Applications for motor control technology can be found in many different fields. The following are some of the main benefits:
1. Efficiency of Energy Use:
Motor speed, torque, and position can all be precisely controlled by motor control systems, which maximize energy consumption.
Power Factor Correction (PFC) and Variable Frequency Drives (VFDs) are two examples of energy-saving technologies that enhance power factor and adjust motor operation in response to demand.
2. Precision & Accuracy:
Advanced control algorithms such as PID and Field-Oriented Control (FOC) provide precise control over motor parameters, ensuring proper motion and placement in robotics and industrial processes.
3. Improved Results:
The performance of the system is enhanced overall because motor control technology enables smoother acceleration and deceleration and lessens wear and tear on mechanical components.
Faster reaction times and improved dynamic behavior are a result of strong motor control systems.
4. Lower Maintenance Expenses:
Predictive maintenance features, which save maintenance costs and downtime by identifying issues before they lead to equipment failure, are made possible by motor control technology.
Two more elements that increase equipment life and reduce maintenance requirements are soft starts and controlled acceleration and deceleration.
5. Adaptability and Flexibility:
Motor control systems can be employed in situations where the load needs fluctuate because of their flexibility.
Programmable controllers and flexible communication protocols enable easy integration into a wide range of automation systems.

Motor control technology can recover energy during braking and deceleration through the use of regenerative braking.
This feature can be particularly useful in situations where stopping is done frequently and contributes to greater energy efficiency.
7. Industry 4.0 Integration and Automation:
Motor control technology is a key component used in Industry 4.0 and smart factory implementations.
Modern communication protocols and data analytics integration assist data-driven decision-making and optimization.
8. Monitoring and Control at a Distance:
Integration with IoT and communication protocols enables remote monitoring and control of motorized systems, enabling real-time diagnostics and alterations.
Remote access facilitates troubleshooting and reduces the need for on-site interventions.
The motor control technology’s shortcomings
Motor control technology has many advantages, but it also has some disadvantages and challenges in its use. Among the principal downsides are the following ones:
1. Price and intricacy:
The intricacy of developing, putting into practice, and maintaining sophisticated motor control systems can lead to higher initial costs.
Because these systems are complex, specialized skills may be required for installation and troubleshooting.
2. Sensitivity to Environmental Conditions:
It is evident how sensitive motor control systems are to many environmental factors, such as temperature, humidity, and pollution. Weather extremes might affect performance and dependability.
3. Electromagnetic interference (EMI) compatibility:
Electromagnetic interference from motor control electronics may affect other nearby electronic devices. Appropriate shielding and filtering are required to lower EMI.
Compatibility issues may arise when integrating motor control systems with machinery or systems that are already in place.
4. Restricted Tolerance to Fault:
Although motor control systems are often equipped with safety safeguards, they may not be as fault-tolerant as they may be. Failed vital control systems may cause unexpected motor action and possibly cause damage.
5. Maintenance Difficulties
Predictive maintenance features do not guarantee against unexpected failures, thus prompt intervention is still necessary.
Certain applications may be concerned about downtime during maintenance, and certain skills may be required for maintenance.
6. Restricted Standardization

When attempting to mix parts from multiple manufacturers, integration challenges may come up.
7. The Learning Curve
when using new technologies or control algorithms, engineers and technicians may need to go through a learning curve to deploy and optimize motor control systems.
Conclusion:
To sum up, motor control technology is a revolutionary and transformative force that is reshaping various sectors by enabling us to operate motors more efficiently and intelligently. Automation and industrial processes have advanced greatly due to their many advantages, including improved safety, precision, and energy efficiency. When combined with predictive maintenance capabilities, the capability to remotely monitor and regulate motors lowers maintenance costs and downtime, promoting a more dependable and sustainable operating environment.
But it’s important to recognize the difficulties with motor control technologies. The intricacy of these systems, possible sensitivity to environmental factors, and compatibility and standards concerns highlight the necessity of meticulous preparation, execution, and continuous upkeep. To guarantee the integrity and security of these vital systems, the integration of motor control systems into the larger Industry 4.0 framework also presents cyber security issues that need to be resolved.
Research and development efforts are being made to further improve the adaptability, robustness, and ease of integration of motor control technology, as well as to mitigate these issues as technology continues to evolve. The continued convergence of technology innovation and real-world application holds the potential to unleash even higher efficiency, opening the door to more intelligent, networked, and environmentally friendly industrial processes. A balanced strategy that takes into account both the benefits and drawbacks of motor control technology navigation will be essential for successful adoption and long-term gains.
#Autonomousvehicle#motorcontrol#technology#evcc#ccu#evse#ProgrammableVCU#embeddedsystem#Dorleco#VCUSupplier#VCU#Controlsystem
0 notes
Text
Optimal Power Distribution in All-Wheel Drive EVs
July 15, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction

The ideal Optimal Power Distribution greatly enhances All-Wheel Drive (AWD) Electric Vehicles (EVs) performance, economy, and safety. AWD EVs are becoming more and more common because of their superior handling, grip, and stability when compared to their front- or rear-wheel-drive counterparts.
The fundamentals of AWD EVs: Electric motors installed on the front and rear axles of AWD EVs supply power to all four wheels. In a variety of driving situations, such as slick or rainy roads, uneven terrain, and rapid driving, this arrangement increases grip and stability.
Obstacles in the Distribution of Power: AWD EVs must control the torque delivered to each wheel or axle to achieve several objectives, such as:
We’ll go over the key concepts and variables to consider maximizing power distribution in AWD EVs in this introduction.
To prevent wheel spin and loss of control, power should be applied to the wheels with the best traction to maximize traction and stability.
Power delivery needs to be managed to minimize energy consumption and extend the vehicle’s range to operate at peak efficiency.
Performance improvement: Power distribution to improve handling, cornering, and acceleration. By preventing situations where oversteer or understeer could result in collisions, safety is guaranteed.
Control Systems and Sensors: To continuously monitor a variety of parameters, AWD EVs rely on complex control systems and a large range of sensors. Among these sensors are gyroscopes, accelerometers, wheel speed sensors, and even cameras. The data from these sensors is used to immediately adjust the distribution of electricity.
Traction Control: To regulate power distribution, traction control systems are necessary. If wheel spin is identified, they can reduce torque to specific wheels only. This enhances stability and keeps traction.

Torque Vectoring: Several AWD EVs are equipped with torque vectoring technologies. These systems alter the torque given to each wheel independently, giving the driver fine control when cornering. This improves handling and lessens the chance of under- or oversteering.
Benefits of All-Wheel Drive EVs’ Optimal Power Distribution
Optimal power distribution in All-Wheel Drive (AWD) Electric Vehicles (EVs) improves performance, safety, and driving comfort, among other things. Here are a few key benefits:
Enhanced Traction and Stability: By distributing torque to the wheels with the greatest grip, improved power distribution ensures that traction and stability are increased. Consequently, traction on slick surfaces such as ice or wet roads is significantly improved. Additionally, there is improved stability when cornering and accelerating. AWD EVs may navigate challenging conditions with greater assurance.
Better Handling and Cornering: Optimal power distribution, especially when paired with torque vectoring technology, enhances the vehicle’s capacity to precisely manage corners. Less likelihood of understeer, or front-wheel skid, and oversteer, or rear-wheel skid, results in more predictable and secure handling qualities.
Improved Performance: When AWD EVs’ power distribution systems are adjusted, they can deliver incredible acceleration and performance. Because they may provide power to all four wheels, allowing for quicker launches and better control in high-performance driving scenarios, they are appealing to aficionados of sports cars.
Enhanced Off-Road Capability: AWD EVs typically come with terrain-specific driving modes that optimize power distribution for off-road circumstances. For thrill-seekers who want to cross challenging terrain without sacrificing performance or safety, they are consequently perfect.
Efficiency of Regenerative Braking: When power is dispersed during Regenerative Braking in an ideal manner, maximum energy recovery takes place. By efficiently distributing regenerative braking power over all wheels, AWD EVs may absorb more energy during deceleration and so increase their range.

The drawbacks of all-wheel drive electric vehicles’ optimal power distribution
Although all-wheel drive (AWD) electric cars (EVs) with excellent power distribution offer numerous advantages, there are also certain possible disadvantages and considerations to make:
Complexity and Cost: The incorporation of contemporary power distribution networks may increase the complexity and production costs of AWD EVs. Because of this, compared to their front-wheel-drive or rear-wheel-drive counterparts, these cars may be more expensive to build and maintain.
Weight Gain: Adding more electric motors and powertrain components, together with AWD systems, can make a car much heavier. This extra weight could reduce the vehicle’s overall efficiency and range if it is not appropriately compensated for in the architecture.
Decreased Efficiency: c electric vehicles (EVs) are known for having better grip and stability, but they may use more energy than two-wheel drive EVs. This is because the extra parts required for AWD may require a higher energy consumption.
Complex Maintenance and Repairs: AWD systems may require more intricate maintenance and repairs, especially if they feature many electric motors. Mechanics and technicians require certain training and equipment to maintain these systems, which could increase maintenance expenses.
Possible Reliability Issues: As a vehicle’s component count rises, so does the risk of component failures. Because AWD EVs have so many electric motors, sensors, and control systems, they can be unreliable. This could lead to increased maintenance requirements and downtime.

Conclusion:
To sum up, the best possible power distribution in All-Wheel Drive (AWD) Electric Vehicles (EVs) is a major automotive technology development with many benefits that improve vehicle versatility, safety, and performance. AWD EVs deliver better handling, grip, and stability in a variety of driving situations and perform very well in demanding driving conditions.
Better traction and stability, enhanced handling and cornering, increased performance capabilities, efficient regenerative braking, safety in emergencies, adaptability through driving modes, suitability for winter driving, and the possibility of future technological advancements are all benefits of optimal power distribution in AWD EVs.
It is imperative to recognize several possible drawbacks, but, including elevated intricacy and expenses, supplementary mass, possible declines in productivity, intricate upkeep and restoration prerequisites, possible dependability concerns, and preliminary financial obstacles. It is important to carefully weigh these disadvantages against the unique requirements and goals of potential customers.
The automobile industry is expected to improve and develop AWD EV systems as technology advances, reducing some of the drawbacks and further maximizing power distribution for effectiveness and performance. All things considered, efficient power distribution in AWD EVs marks a noteworthy advancement in the development of electric vehicles by giving customers more options that cater to their driving needs and preferences.
#Autonomousvehicle#OptimalPowerDistribution#AWDEVs#evcc#ccu#evse#ProgrammableVCU#embeddedsystem#Dorleco#VCUSupplier#VCU#Controlsystem
0 notes
Text
Autonomous Vehicle Chassis
July 12, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction
The chassis of autonomous vehicles is a crucial component that supports and integrates the cutting-edge technology required for autonomous driving. Considering the following elements is crucial when it comes to autonomous vehicle chassis:
1. Sensor Integration:
Autonomous vehicles use a variety of sensors to sense their surroundings, such as lidar, radar, cameras, and ultrasonic. These sensors need to be placed precisely inside the chassis during construction to reduce interference and improve visibility.
2. Computer hardware:
The Autonomous Vehicle Chassis contains the computational hardware — powerful processors and control units, for example — needed to handle the massive amount of data collected by the sensors. These parts frequently require specialized cooling and mounting systems.
3. Architecture for Electrical Systems:
Autonomous vehicles require complex electrical systems to regulate the connection between sensors, actuators, and the central processing unit. The chassis must have a robust electrical architecture to ensure dependable connectivity and data transfer.
4. Systems of Redundancy:
Redundancy mechanisms are often incorporated into chassis designs due to the many moving parts involved in autonomous driving. This includes more power supply systems, computer systems, and sensors to increase the vehicle’s dependability and security.
5. Distribution of Power:
Electricity is needed for actuators, processing systems, and sensors to work. All components need a steady and reliable power supply, so the chassis design needs to have a power distribution system that works.
6. Vehicle Communication:

Autonomous vehicles often require communication with other vehicles and the infrastructure to facilitate cooperative driving and enhance overall safety. The Autonomous Vehicle Chassis ought to facilitate the integration of the antenna and communication module.
7. Safety and Structural Integrity:
The safety of the passengers in an accident is contingent upon the chassis retaining a high degree of structural integrity. To protect fragile equipment and passengers, autonomous vehicles need to be designed with crashworthiness and impact absorption in mind.
8. Adaptive Suspension Systems:
Suspension systems on some autonomous cars can be adjusted to optimize ride quality and vehicle stability while driving on their own. These technologies can instantly change the suspension settings based on the driving conditions and the condition of the road.
9. Interior Design and User Experience:
The chassis design affects the interior arrangement of autonomous vehicles. The absence of typical driver-focused elements on the chassis allows for innovative interior design, like moveable seats and entertainment systems that enhance the entire user experience.
10. Compliance with Rules:
The legal and regulatory requirements for self-driving technology are taken into consideration throughout the design of the autonomous vehicle chassis. Autonomous vehicles that adhere to safety regulations and standards will be able to drive on public roads.
Autonomous Vehicle Chassis Drawbacks
While autonomous vehicle technology has great promise, there are several challenges and potential drawbacks associated with the chassis of these vehicles. Here are a few noteworthy drawbacks:
1. The price of technology
Redundancy systems, computing hardware, and advanced sensor integration can raise the cost of the autonomous car chassis. This expense may keep more customers from utilizing autonomous technologies.
2. Complexity of Reliability:
Autonomous vehicles incorporate sophisticated technology like computers, sensors, and communication modules into their chassis. Maintenance costs may rise if these intricate parts require specialized training and equipment for upkeep and repairs.
3. Limitations on Sensations:
Existing sensor technologies, including radar and lidar, have certain limitations, especially in inclement weather conditions like snow or prolonged rain. The high reliance of the chassis’s vision and navigational systems on sensor inputs may compromise the dependability of autonomous systems.
4. Cyber security issues:

Driverless automobiles are susceptible to cyber security threats. The possibility of hacking and illegal access to vital systems rises as the chassis becomes more interconnected and dependent on data interchange, which might raise privacy and safety issues.
5. Infrastructure Dependence:
The efficiency of self-driving cars depends on an established and standardized infrastructure, such as communication networks, signage, and road markings. Autonomous vehicle chassis performance can be affected in areas with poor infrastructure or conflicting norms.
6. Ethical Dilemma:
Autonomous vehicles are built to react quickly in a range of circumstances, including potential crashes. There are moral dilemmas when deciding how to prioritize passenger safety over pedestrian safety, which calls into question the responsibility and decision-making algorithms integrated into the chassis.
7. Acceptance and Belief by the Public:
Gaining public trust is one of the largest obstacles facing autonomous automobile technology. Potential customers’ reluctance and mistrust stemming from concerns about cyber security, safety, and chassis dependability may impede widespread adoption.
8. Limited Autonomy in Complex Environments:

Autonomous vehicles may encounter difficulties in complex or unpredictable environments, such as crowded urban traffic, construction zones, or unexplored land. There could be difficulties for the chassis while navigating circumstances that require human intuition and dexterity.
Conclusion:
In conclusion, an important factor influencing how transportation will develop in the future is the chassis of autonomous cars. The design of the chassis for autonomous vehicles has several advantages, including sophisticated sensor integration, processing power, and safety measures, but it also has some difficulties and disadvantages.
Positively, the chassis of autonomous vehicles make it easier to integrate cutting-edge technologies, allowing cars to sense their environment, react in real-time, and navigate safely on their own without assistance from a human. The sensors, computer hardware, and communication networks that are the foundation of autonomous driving capabilities can be deployed with the help of the chassis. A more comfortable and user-friendly experience is also a result of advancements in energy efficiency, interior design, and adaptable suspension systems.
However, there are still issues that need to be resolved, such as the expensive cost of technology, the difficulty of maintaining it, the limitations of the sensors, cyber security issues, and the requirement for strong infrastructure and legal frameworks. The widespread deployment of autonomous vehicle chassis is made more difficult by factors like as ethical conundrums, public acceptance and faith in autonomous vehicles, and environmental concerns.
To fully realize the potential of autonomous vehicles, it will be imperative to solve these obstacles as the automotive industry and technology advance. Overcoming obstacles and guaranteeing the safe, effective, and responsible integration of autonomous vehicle chassis into our transportation systems requires continued research, industry collaboration, advancements in sensor technologies, and the creation of comprehensive regulatory frameworks. In the end, the transition to completely autonomous vehicles necessitates a balanced strategy that takes into account societal, ethical, and legal factors in addition to technological progress.
#Autonomousvehicle#chassis#Drivebywire#evcc#ccu#evse#ProgrammableVCU#embeddedsystem#Dorleco#VCUSupplier#VCU#Controlsystem
0 notes
Text
Benefits of Bespoke Controls
July 10, 2024
by dorleco
with no comment
Control Systems
Edit
Introduction:

“Bespoke controls” typically refer to control systems that are made to order or specifically designed to meet specific requirements. These controls are often made to meet unique needs and offer capabilities that other devices on the market might not be able to. The term “bespoke” implies that these controls are custom-made, taking into account the particular needs and preferences of the individual or system for which they are intended.
Several domains make use of custom controls, including:
Industrial Automation: In manufacturing and industrial settings, certain machinery, systems, or procedures may require the creation of custom controls. The unique requirements of the production environment are satisfied with optimal performance and efficiency as a result of this change.
Home automation: Customized controls for smart homes could involve developing distinctive user interfaces to manage various smart devices, security systems, lighting settings, and additional features. These parameters can be altered by the homeowner to fit their preferences and daily schedule.

Aerospace and Defence: In aircraft and military applications, custom controls are necessary for complex system operation, navigation, and communication. The design of these controls typically satisfies strict standards for dependability and safety.
Scientific and Research Instruments: In laboratories and research facilities, specialized equipment and instruments may call for particular controls. These measures are put in place to ensure that scientific research is conducted with correctness and precision.
Benefits of Customized Controls
Bespoke controllers are created to order and offer several advantages. The following are a few key benefits:
Tailor to certain Needs: Custom controls are primarily advantageous because they are designed to specifically meet certain needs. By doing this, you can be sure that the controls are optimized for optimal performance, precisely matching the needs of the user or the system.
Optimized Performance and Efficiency: Because custom controls are created with a deep understanding of the intended application, they may be optimized for both performance and efficiency. This may lead to improved operational processes and enhanced system performance.
User-Friendly Interfaces: By designing custom controls with the end user in mind, user interfaces can be made to be both intuitive and user-friendly. This can be particularly significant for applications, like consumer electronics or medical devices, where user-friendliness is essential.
Integration with Current Systems: It is possible to design custom controls that interact harmoniously with the systems and technology of today. This is particularly useful when compatibility with specific hardware or software is required.
Flexibility and Scalability: When creating custom controls, scalability can be taken into account, which makes it easy to add or remove functionality as needed. This flexibility is essential in dynamic environments where requirements may change over time.
Enhanced Safety and Reliability: Tailored controls can be designed to comply with stringent standards and regulations, which are crucial in sectors like aerospace, defense, and healthcare. As a result, safety and dependability may be higher than with generic solutions.
Long-Term Cost-Effectiveness: Although the initial construction of customized controls may entail greater upfront expenditures, these costs may be offset by long-term advantages. Over time, cost savings can be achieved through higher productivity, less downtime, and increased efficiency brought about by custom solutions.
Competitive Advantage: Possessing distinct and specific controls can give an organization or industry a competitive edge. Businesses that invest in custom controls can set themselves apart from the competition by providing their clients with superior and cutting-edge solutions.
Capacity to Conform to Industry-Specific Requirements: Industry-specific regulations and standards vary. Tailored actions can be designed to satisfy these needs, ensuring compliance and reducing the risk of legal issues.
Customization to Specific User Preferences: In consumer-oriented devices such as gaming peripherals or smart home appliances, bespoke controls allow customization to particular user preferences. This could enhance overall customer satisfaction and experience.
The Drawbacks of Customized Controls
Despite the many advantages of custom controls, there are certain challenges and disadvantages associated with their development and implementation. When deciding whether to use custom controls, it is imperative to consider these factors. Here are a few typical disadvantages:
Higher Initial Expenses: Developing bespoke controls typically involves higher upfront costs in comparison to off-the-shelf choices. Engineering, testing, and customization processes may add a substantial amount to the initial cost.
Extended Development Time: Developing custom controls may take longer than utilizing pre-made options. Extended phases of design, development, and testing might affect project timelines.
Limited Vendor Support: Vendor support, which includes routine patching, upgrading, and troubleshooting assistance, is usually included with pre-made solutions. Bespoke controls might not have much support, especially if they were developed by a single company or a small team.
Dependency on Key Personnel: A select team or individual with specialized skills may design custom controls. Dependence on essential staff members might provide difficulties, particularly when team adjustments or continuous assistance are needed.
Risk of Over-Engineering: There’s a chance that bespoke controls will be over-engineered to satisfy certain requirements. Later, this might lead to unnecessary complexity, increased expenses, and challenges with upkeep and upgrading.
Integration Issues: Custom controls may have trouble integrating with other technologies or systems, particularly if standards for hardware or software are changed or the infrastructure is changed.

Lack of Standardization: Off-the-shelf products usually adhere to industry standards to guarantee compatibility and interoperability. Integrating bespoke controls into bigger ecosystems or interacting with other systems could be challenging since they couldn’t follow the same standards.
Possibility of Limited Innovation: Access to cutting-edge solutions established in the bigger market may be limited since unique controls are made to satisfy specific needs. Updates and enhancements could be beneficial for off-the-shelf systems continuously.
Long-Term Maintenance Issues: It can be challenging to update and maintain custom controls, especially if the original development team has left or if the documentation is insufficient. This could eventually make it harder to solve issues or make the required changes.
Risk of Technological Obsolescence: Because technology is advancing so quickly, customized controls run the risk of becoming obsolete sooner than standardized ones. Maintaining compatibility over time and keeping up with technological changes could be challenging.
Conclusion:
To sum up, custom controls have several benefits, including customized functionality, improved performance, and flexibility to meet specific needs. Custom controls are useful in a variety of industries, including manufacturing, aerospace, healthcare, and consumer electronics, since they may be precisely tailored to match the requirements of particular applications. However, it’s crucial to carefully weigh any potential drawbacks, such as increased upfront expenses, longer development times, and maintenance and integration-related difficulties.
The choice to use custom controls should be motivated by a careful analysis of the project’s needs, long-term objectives, and financial constraints. Businesses and developers should be aware of the trade-offs and difficulties involved in the development and deployment of custom solutions, even though they may offer a competitive advantage and better performance in some situations. Achieving the best possible outcomes and minimizing any negative effects from customized controls requires careful design, thorough documentation, and continuous assistance.
The decision between custom controls and off-the-shelf solutions ultimately comes down to the particular requirements of the project, the amount of customization needed, and the available resources. Giving careful thought to these elements will help ensure that custom controls are implemented successfully and match the goals and priorities of the application or system in question.
0 notes
Text
Plug-in Hybrid Electric Vehicles (PHEVs)
July 9, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction
Plug-in Hybrid Electric Vehicles (PHEVs): What are they?
Plug-in Hybrid Electric Vehicles is an abbreviation that stands for them. It’s a car featuring an electric drivetrain and an internal combustion (IC) engine. Unlike typical hybrid vehicles, plug-in hybrid electric vehicles (PHEVs) have a larger battery pack that enables them to run at slower speeds exclusively on electricity.
By attaching the battery to an external power source, it can be charged. Regenerative braking or the IC engine both provide additional battery charging. When the car is cruising at a high speed, the internal combustion engine may take over and drive the vehicle. In certain cases, the engine’s efficiency can be raised by the electric motor as well. Similar to a conventional hybrid car, a plug-in hybrid electric vehicle (PHEV) has a bigger battery pack and can run entirely on electricity.
Powered by both a combustion engine and an electric motor
PHEVs are powered by an internal combustion engine in addition to a battery-operated electric motor. PHEVs often have larger battery packs than hybrid cars. This is referred to as the vehicle’s “electric range” and allows an automobile to travel on electricity alone for moderate distances (between 15 and 60+ miles for modern models).
The majority of a plug-in hybrid electric vehicle’s power requirements when traveling in cities can be met by its stored charge. For example, a driver of a light-duty plug-in hybrid electric vehicle (PHEV) can charge their car overnight so they can go anywhere entirely electric the following day, or they might drive to and from work only on electricity. When the car needs heating or air conditioning more than usual, when the battery is almost completely dead, or when the speed is high, the internal combustion engine powers the car.
PHEV types
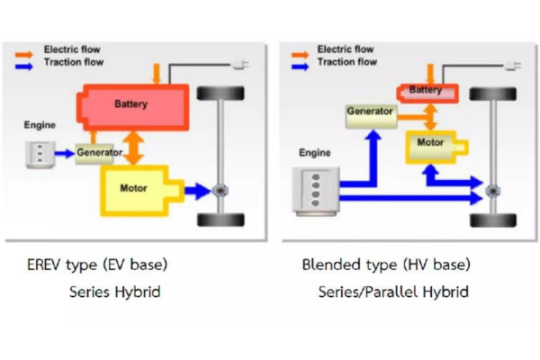
Additionally, plug-in hybrid configurations are available in two separate styles.
Series plug-in hybrid: In this setup, the car only gets propulsion from its electric drivetrain. Until the battery runs out of juice, the car just uses electricity. The engine runs the electric motor whenever the battery becomes low. For brief excursions and low speeds, the series plug-in hybrid may not require regular fuel.
Parallel plug-in hybrid: In this setup, the vehicle is driven almost entirely by its electric powertrain in addition to its conventional engine. Usually, when the car is powered purely by electricity, it can only drive slowly.
Important parts of the PHEV’s
Auxiliary battery this low-voltage battery starts an electric automobile before the traction battery is engaged and provides power to the vehicle’s accessories.
Charge port: The charge connector allows you to connect the vehicle to an external power source to recharge the traction battery pack.
Electric generator: This apparatus generates electricity from the brake wheels and feeds it back into the traction battery pack. Some cars have motor generators installed that function as the driving and regeneration units.
Electric traction motor: This motor uses energy from the traction battery pack to turn the vehicle’s wheels. Some cars have motor generators installed that function as the driving and regeneration units.
Internal combustion engine (spark-ignited): In this setup, air, and fuel are mixed via injection into the intake manifold or combustion chamber. A spark plug is used to ignite the fuel/air mixture.
DC/DC converter: This gadget transforms the traction battery pack’s higher-voltage DC power into the lower-voltage DC electricity required to operate car accessories and replenish the auxiliary battery.
Exhaust system: The exhaust system transfers waste gases from the engine toward the exhaust pipe. The three-way catalyst in the exhaust system is designed to reduce engine-out emissions.
Gasoline filler: To fill an automobile’s tank, a gasoline dispenser’s nozzle is fixed to the container.
Tank for gasoline: This container retains gasoline within the vehicle until the engine needs it.
Power electronics controller: This device controls the flow of electrical energy from the traction battery to control the speed and torque output of the electric traction motor.
Thermal system (cooling): The engine, electric motor, power electronics, and other components are kept within the proper operating temperature range by the thermal system (cooling).
Traction battery pack: The traction battery pack stores electricity for use by the electric traction motor.
Transmission: The transmission uses either an electric traction motor or engine energy to mechanically drive the wheels.
On-board charger: To charge the traction battery, the onboard charger converts incoming AC power from the charging port into DC electricity. In addition to communicating with the charging device, the pack monitors voltage, current, temperature, and charge level as it is being charged.
How Do Plug-In Hybrid Electric Cars Work?
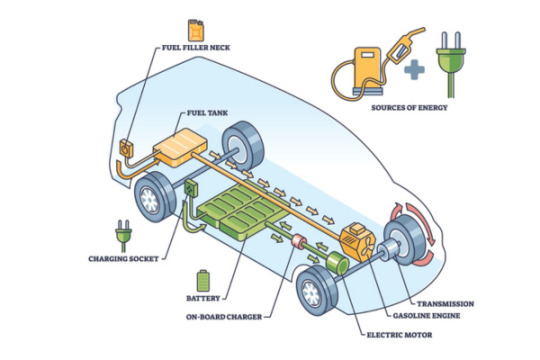
It’s simple: after filling up the car with gasoline or diesel as usual (most plug-in hybrid electric cars run on gasoline; don’t ask us why), you plug it in using a designated socket and cable once you arrive home.
Most people install an external home charging device, often called a wall box, in their garage or house to make this possible, while some get by with an extension cord. At all times, stay away from it.
The car may drive without using the engine at all for a predetermined period after the battery is fully charged. Depending on the type, you can often drive 20 to 60 miles on a full battery; however, the manufacturer states on paper that you can travel about a third less.
The majority of PHEVs have three modes: combustion, hybrid, and electric. You can store your charge in combustion mode until you need it, and when you drive in hybrid mode, the engine and battery power are used as efficiently as possible.
When the car is in E-mode, it is forced to use just the battery’s energy until it runs out. This might be quite helpful if you’re traveling to an urban area and don’t want the residents to breathe in your exhaust emissions — you are a considerate person.
A plug-in hybrid electric vehicle’s motor or motors are powered by the battery when it is operating in electric mode. Some require the engine to step in and help over a certain speed, while others may drive alone up to highway speeds.
In hybrid mode, a computer decides when to utilize the engine and motor most efficiently, often alternating between them or using both at once. All you have to do is drive normally here. The best PHEVs will seamlessly integrate the two power sources such that, when driving, you won’t even notice the difference.
The battery-stored electricity powers the motor or motors of a plug-in hybrid electric vehicle (PHEV) when it is in electric mode. Some can drive alone until they reach motorway speeds, but after that, the engine has to step in and help.
When you drive in hybrid mode, a computer decides when it is best to use the engine and motor, often alternating between them or using both at once. Here, you just need to drive normally because the best plug-in hybrid cars (PHEVs) seamlessly integrate the two power sources so you won’t even notice the difference in performance.
What is the duration required for charging?
Again, it depends on the model. While fully electric vehicles typically have batteries that weigh between 10 and 20 kWh, some greatly exceed this range, plug-in hybrid electric vehicles (PHEVs) lack the quick charging technology that allows plug-in vehicles (EVs) to be charged in less than an hour. When you had a full gas tank as a backup that would be overkill.
Expect a minimum of five hours to fully charge a normal 2–3kW household supply. This might sound like a lot, but if you leave your gadget plugged in at work during the day or overnight, it is more than plenty. By using one of the above-mentioned wall boxes, you might cut your top-up power use by up to 7kW.
What else should I know about plug-in hybrids?
Since more technology means more money, they are typically more expensive than their gasoline and diesel counterparts. They will still be more expensive and heavier than non-hybrid vehicles even though they have smaller batteries than electric vehicles. Even a few kilowatt-hours’ worth of cells to carry about is a significant weight.
The inside space is also impacted by the battery. There is typically less space inside for luggage and other objects because the majority of PHEVs store their batteries beneath the back seats and boot.
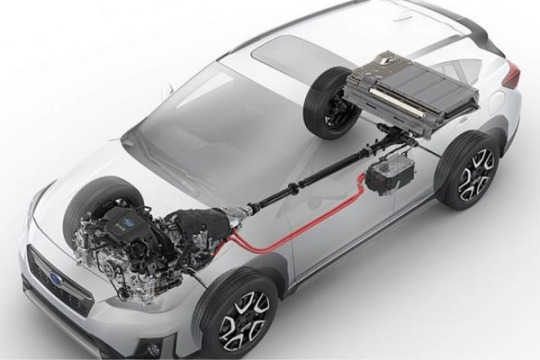
Conclusion:
Plug-in hybrid electric cars, or PHEVs, offer a potential solution to the challenges associated with making the transition from traditional internal combustion engine vehicles to more environmentally friendly ones.
This analysis demonstrates how plug-in hybrid electric vehicles (PHEVs) offer a distinct set of benefits by fusing the range and convenience of gasoline engines with the efficiency and low emissions of electric power.
Furthermore, consumers who may be hesitant to completely commit to electric vehicles due to concerns about range anxiety or the accessibility of charging infrastructure have a transitional choice in PHEVs. This contributes to the decreasing difference between completely electric and conventional automobiles.
With the ability to transition between electric and hybrid modes, plug-in hybrid electric vehicles (PHEVs) are a practical solution that can accelerate the adoption of electric drivetrains and pave the way for a more sustainable transportation future.
In conclusion, even though they might not be the ideal solution to every transportation issue, plug-in hybrid electric vehicles (PHEVs) unquestionably offer a compelling combination of benefits that make them a valuable transitional technology in the path toward a greener and more efficient mobility ecosystem.
Future transportation planning could be greatly impacted by PHEVs as public attitudes toward sustainability shift and technology progress.
0 notes
Text
What is the AUTOSAR framework and why it is used?
July 8, 2024
by dorleco
with no comment
Control Systems
Edit
Introduction

A standardized automotive software architecture called the Automotive Open System Architecture, or AUTOSAR for short, was created to facilitate the development of embedded software for automobiles. It was established as a joint venture by various automakers, suppliers, and other enterprises involved in the automotive industry. The goal of the AUTOSAR framework is to create a common standard for automotive software that will enable interoperability, scalability, and reuse in a variety of vehicle domains.
Key concepts and attributes of the AUTOSAR framework include:
Standardized Architecture: The AUTOSAR software architecture describes the essential elements, interfaces, and communication protocols for automotive software.
Layered Structure: The application layer, basic software layer, run-time environment (RTE) layer, and microcontroller abstraction layer are the several levels that make up the architecture. This layered structure allows application-specific software to be segregated from the underlying hardware and communication protocols.
Communication and Network Management: AUTOSAR defines standardized communication protocols and network management techniques to enable communication between different software components inside an automobile’s electronic control units (ECUs). The
Communication Stack (Comstock) provides a standardized collection of communication services.
VCU Abstraction: AUTOSAR aims to abstract hardware details so that software can be developed without regard to the underlying microcontroller or hardware platform. Software components are now easier to reuse on several ECUs and are more portable thanks to this abstraction.

Configuration and Integration: The AUTOSAR approach highlights the need for configuration and integration. System designers build the software components based on the specific requirements of an automobile, and tools are used to generate the necessary code and configuration files.
Standardized Interfaces: AUTOSAR makes it easier to integrate components from different vendors by defining standardized interfaces between software components. These guidelines promote adaptability and communication.
Tooling facilitates: To make AUTOSAR-compliant development easier, several tools are available to assist with configuration, integration, and code creation. These tools help manage the complexity of the software development process.
Scalability: AUTOSAR can be used for a range of automotive systems, including small, resource-constrained ECUs and high-performance controllers.
Characteristics of the AUTOSAR system
The AUTOSAR (Automotive Open System Architecture) framework’s core features specify its approach to creating automotive software. These features enable the framework to provide a standardized, scalable, and flexible architecture for embedded systems in automobiles. Several notable features of the AUTOSAR framework are as follows:
Layered Software Architecture: The application layer, basic software layer, run-time environment (RTE) layer, and microcontroller abstraction layer are some of the tiers that make up AUTOSAR’s layered software architecture. The layered structure of this software divides and arranges its many components to make it more modular and portable.
Component-Based Development: The framework promotes the use of component-based development techniques. Software components are modular and may be developed independently, which simplifies integration, reuse, and maintenance.
VCU Abstraction: AUTOSAR allows software components to be built without taking into account the unique hardware platform by concealing the underlying hardware details. Software components are now easier to reuse and more portable across a range of electronic control units (ECUs) and vehicle platforms thanks to this abstraction.
Network Management and Communication: The framework provides a standardized communication stack (ComStack), as well as a defined communication protocol and network management techniques. This ensures that software components that are a part of the automobile’s electronic architecture will communicate dependably and consistently.

Configuration and Integration: AUTOSAR places a high value on configuration and integration. System designers utilize tools to generate the necessary code and configuration files, and they configure software components based on vehicle specifications. This approach enhances flexibility and adaptability.
Tooling Support: To make AUTOSAR-compliant development easier, several tools are available to assist with configuration, integration, and code generation. These tools ensure that the AUTOSAR standard is followed and help manage the complexity of the development process.
Diagnostics and Error Management: The framework includes standardized error management and diagnostic methods. This facilitates the development of diagnostic software and instruments, improving vehicle maintenance, repair ability, and fault detection.
Component Selection Freedom: AUTOSAR offers freedom in the integration and selection of software components from several manufacturers. This flexibility stimulates competition and innovation among suppliers, ultimately benefiting the automotive industry.
Drawbacks of the AUTOSAR architecture
In addition to its many benefits, the AUTOSAR framework architecture has several drawbacks and challenges. It’s important to consider these criteria while deciding whether to employ AUTOSAR in a given automotive software development project. The AUTOSAR framework has the following drawbacks:
Complexity: Because of its standardized and layered architecture, AUTOSAR adds a certain amount of complexity. The complexity of the framework may result in extended development times and a steep learning curve for inexperienced developers.
Resource Consumption: Due to the framework’s layered architecture and established approach, more memory and processing power may be required. This could be an issue for embedded systems with constrained resources, especially in applications where optimization is crucial.
First work to be done in implementation: Starting a project with AUTOSAR from scratch or integrating AUTOSAR into an existing system may require a significant amount of upfront work. This is particularly true for older systems whose architecture needs to be modified to comply with the framework.
Restricted Real-Time Support: AUTOSAR offers a real-time operating system (RTOS) and tools for managing requirements in real-time, but in terms of strict real-time constraints, it may not be as adaptable as other proprietary solutions. Applications that are strictly time-sensitive and safety-critical may find this constraint difficult.
Tooling and Compatibility: Locating and utilizing appropriate development tools might be challenging. Certain tools might not be able to support the most recent AUTOSAR specifications, and integrating tools from several sources might cause compatibility issues.
Large Overhead for Small Projects: The framework may incur a significant amount of overhead for simple applications or small projects. In many cases, the benefits of uniformity and scalability may outweigh the additional complexity and development effort.
Restricted versatility: Although AUTOSAR promotes uniformity, developers accustomed to more flexible, non-standardized approaches may find that this limits their versatility. The strict limitations of the framework may not be suitable for some specialized or non-traditional applications.
Dependency on Ecosystem: The success of AUTOSAR depends on an established ecosystem of suppliers, resources, and developers who follow the standards. Dependency on this ecosystem may be risky, especially if its development deviates from the specifications of a specific project.
Steep Learning Curve: The complexity of the system and the concepts that go along with it may entail a steep learning curve for developers who are not familiar with the AUTOSAR framework. Gaining proficiency in AUTOSAR through training can take some time.

Increased Overhead for Limited-Scale Projects: The overhead of AUTOSAR may outweigh its benefits in projects that are limited in scope or have minimal software complexity. Smaller teams could find it challenging to justify the cost of putting the full AUTOSAR specification into practice.
Conclusion:
In conclusion, the AUTOSAR framework framework — which offers a methodical and standardized way to design embedded software for vehicles — has become an important industry standard in the automotive sector.
Even though AUTOSAR has several noteworthy benefits, like scalability, interoperability, and standardization, it is important to recognize the complexities and difficulties that come with it.
Modular, reusable software components are produced in part by the framework’s layered architecture, component-based development, and emphasis on configuration and integration. Consequently, this encourages cooperation between various automotive ecosystem participants, such as suppliers, developers, and manufacturers.
Interoperability is improved by standardizing interfaces and communication protocols, which gives designers and integrators more freedom when choosing and combining parts from various suppliers.
Adoption of AUTOSAR is not without its problems, though. There may be issues with the framework’s intricacy, resource usage, and possible overhead for smaller projects or more straightforward applications. There could be a learning curve for developers, and smooth compliance with the tooling ecosystem isn’t guaranteed all the time.
The advantages and disadvantages of using AUTOSAR must be thoroughly considered by project teams before making a decision. AUTOSAR can provide notable benefits for large-scale projects requiring standardization and scalability together with complicated software needs.
However, alternate strategies might be more appropriate for smaller projects with looser specifications or for those where flexibility is a larger concern.
The AUTOSAR standard is still being updated and improved upon, which highlights how flexible it is in response to the shifting needs of the automobile sector. Future automotive software development is expected to be greatly influenced by the framework as the AUTOSAR ecosystem continues to grow, resolving issues and improving tooling support Ultimately, the decision to adopt AUTOSAR should be based on a thorough assessment of the project’s needs, the framework’s benefits and drawbacks, and the resources needed for the project.
#Handsoncontrol#AUTOSARFramework#evcc#ccu#evse#ProgrammableVCU#embeddedsystem#Dorleco#VCUSupplier#VCU#Controlsystem
0 notes