#Programablevcu
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
When “GIF” was named word of the year in 2012, Oxford Dictionaries U.S.A. credited Tumblr for pushing the word.
Text
Machine Learning And Advanced Driver Assistance Systems (ADAS)
June 5, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction

The automobile industry is changing dramatically as a result of the inclusion of cutting-edge technologies. Machine learning (ML) in conjunction with Advanced Driver Assistance Systems (ADAS) is one example of a technology that is improving traffic safety and redefining the future of transportation.
This essay investigates the mutually beneficial relationship between ML and ADAS, emphasizing their contributions to improving traffic safety, lowering accident rates, and laying the framework for self-driving vehicles.
1. Understanding machine learning (ML).
Artificial intelligence (AI) is a subset that enables computers to learn from data and patterns without the need for explicit programming. Computers can identify large datasets and extract important insights using machine learning methods. These insights can then be used to help make forecasts and decisions.
ML is employed in a variety of fields, including finance, healthcare, and e-commerce, but its impact on the automotive industry, notably in ADAS, has been transformative.
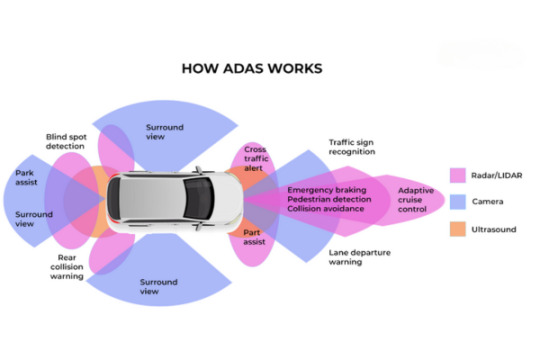
2. Advanced driver assistance systems (ADAS).

The word “ADAS” refers to a set of sophisticated tools and systems designed to aid drivers’ decision-making and improve overall traffic safety. These systems rely heavily on sensors, cameras, radars, and other data sources to perceive the environment and provide real-time feedback to the driver, as well as to function autonomously in some cases.
ADAS characteristics may include:
Adaptive Cruise Control (ACC): automatically adjusts the vehicle’s speed to keep a safe following distance from the vehicle in front of it.
Lane Departure Warning (LDW): Alerts the driver if the vehicle leaves its lane without turning on the turn signal.
Automatic Emergency Braking (AEB): AEB automatically applies the brakes to avoid or reduce collisions with other vehicles or pedestrians.
Blind Spot Monitoring (BSM): This technology warns the driver of items in the car’s blind spots.
Parking Assistance: Uses cameras and sensors to facilitate safe parking.
3. Machine Learning Benefits for ADAS
Machine learning plays an important role in improving ADAS capabilities by allowing systems to learn from data, adapt to new conditions, and make sound decisions. Here’s how ML improves ADAS capabilities.
Object Recognition and Tracking: Machine learning algorithms analyze sensor data to recognize and track things in real-time, such as moving cars, pedestrians, and barriers. Using this information, ADAS systems can intelligently decide whether to brake, steer, or undertake other safety procedures. Anomaly
Detection: ML models may detect unusual or unexpected driving patterns, such as rapid lane changes. These abnormalities may warn of future dangers, and ADAS can take proper precautions to avoid accidents.
Predictive Analytics: ML algorithms use historical data to predict potential risks and threats. ADAS can actively assist the driver and reduce accidents by anticipating potential hazards.
Adaptive Control: ML allows ADAS systems to change their settings in reaction to the driver’s behavior, traffic patterns, and environmental variables. This flexibility allows for a more personalized driving experience and increases the system’s performance.
Decision Making: ML algorithms enable ADAS to quickly review complex data and make decisions based on a wide range of variables, including traffic density, weather, and road conditions.

4. Applications of ML-Enabled ADAS:
Lane-Keeping Assistance: Using cameras and machine learning algorithms, ADAS can identify lane lines and give the car simple steering commands to maintain it in its lane.
Traffic Sign Recognition: ML helps ADAS identify and interpret traffic signs, including speed limits, stop signs, and no-entry signs, and alerts the driver when necessary using visual or audible signals.
Autonomous Emergency Braking (AEB): When a driver ignores a warning, machine learning algorithms analyze sensor data to identify probable accident risks and automatically apply the brakes.
Adaptive Headlights: ML-enabled ADAS can adjust the angle of the headlights according to the curve of the road and the volume of traffic, increasing visibility while reducing glare for other drivers.
Driver Monitoring: ML systems can monitor the driver’s behaviors and attention levels, detect signs of distraction or fatigue, and offer alerts or help prevent collisions.
5. Challenges and Opportunities for the Future
Despite the numerous benefits of ML-enabled ADAS, there are significant challenges that must be overcome before general acceptance and further development:
Data Quantity and Quality: To learn efficiently, ML models require a large amount of high-quality data. Gathering and annotating a diverse set of representative driving data may be a significant undertaking.
Robustness and Safety: To manage a wide range of environmental variables and scenarios, ML models must be both dependable and resilient. To gain the public’s trust, the ADAS’s safety and integrity must come first.
Regulatory and legal challenges: The combination of ML and ADAS raises numerous complex regulatory and legal challenges, including data protection and liability in the event of an accident.
Human-Machine Interaction: The challenge is to achieve smooth and natural interactions between drivers and machines as ADAS systems become more autonomous.

The future of ML with ADAS is quite bright. The creation of increasingly complicated ML models, as well as the rising availability of high-quality data, will result in more powerful ADAS functionalities and a safer driving experience. As ML models improve, we should expect to see further progress toward fully autonomous vehicles.
Conclusion
The automotive landscape is evolving as a result of the unbreakable collaboration between machine learning and advanced driver-aid systems. Driving becomes safer and more convenient thanks to ML-powered ADAS, which improves vehicle perception, decision-making abilities, and adaptive control.
Even though there are still challenges, the ongoing pursuit of innovation and collaboration among scientists, entrepreneurs, and decision-makers will bring us one step closer to a world in which highways are self-driving and accident-free. To ensure that ML-driven ADAS reaches its full potential as a game-changing force in the automotive industry, we must prioritize safety, ethics, and regulatory frameworks as we implement this technology.
Explore to learn more about machine learning (ML) in conjunction with Advanced Driver Assistance Systems (ADAS). Stay tuned for our new VCU products and services. For further details, you can email us at [email protected].
#ADAS#Autonomousdriving#Machinelearning#emobilitycontrols#Dorleco#VCUProducts#evse#ccu#VCUSupplier#Programablevcu
0 notes
Text
Error Detection And Correction In CAN
June 3, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
INTRODUCTION
Communication is vital in the ever-evolving world of automotive technology. Modern automobiles are outfitted with a variety of technical components that must work seamlessly together. One of the foundations of this communication is the Controller Area Network (CAN), a robust and dependable protocol that allows data to be sent across different components. However, mechanisms for error detection and correction in CAN are required to maintain this reliability. In this blog article, we will go extensively into the topic of error detection and repair in CAN, understanding how important these procedures are in ensuring the safety and dependability of modern vehicles.
The significance of CAN in contemporary automobiles
Before we go into error detection and correction in CAN, let’s look at how it works in modern automobiles.
What exactly does CAN stand for? The Controller Area Network, a robust serial communication protocol, enables vehicle electronic control units (VCUs) to connect. Why is it important? By allowing real-time data sharing between ECUs in charge of activities like as engine control, transmission management, and safety systems, CAN has emerged as the core of automotive communication.
1. The vulnerability of CAN.

Even though CAN is extremely reliable, errors can still occur. Several factors can result in communication mistakes, including:
Noise and interference: The electromagnetic interference created by multiple electrical components in the vehicle environment, which is noisy, can contaminate CAN signals. Defects in transceivers or other hardware components can cause CAN communication problems.
Electromagnetic Compatibility (EMC): Communication issues might arise when different ECUs and components are not compatible.
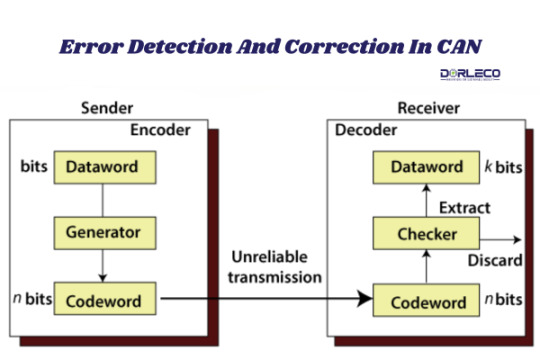
2. Basics of Error Detection in CAN
Various types of error detection CAN mechanisms are utilized to ensure dependability.
The Cyclic Redundancy Check (CRC) algorithm generates a checksum based on the transmitted data. To detect errors, the receiving node computes its CRC and compares it with the transmitted CRC.
The FCS field of the CAN frame, like the CRC, contains checksum information that is used to detect errors.
Bit Stuffing: You can use bit stuffing to ensure that the sender and receiver are in sync. The bit packing pattern may deviate, indicating an issue.
3. Error Correction in the Can
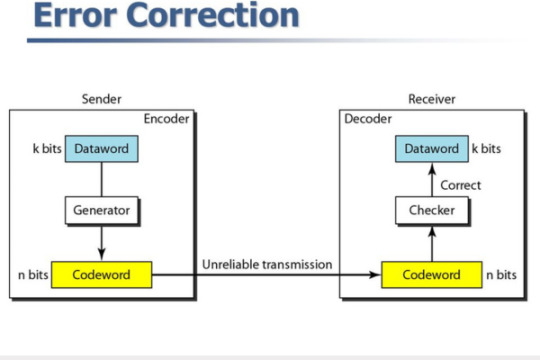
Error Detection in CAN is necessary, but it is not always sufficient. Error-correcting methods go one step further:
Retransmission: If an error is detected, the sender sends the message again. This ensures that the message is appropriately delivered to its intended recipient.
The CAN protocol includes an acknowledgment mechanism that allows the receiver to acknowledge that a message was properly received. If no acknowledgment is received, the sender retransmits, assuming an error.
4. Error Recovery and Handling.
It is critical to understand how to handle CAN faults and recover to assure system dependability.
Error Flags: CAN uses error flags to identify a variety of issues. These warning flags help you discover and fix problems. Error Passive and Error Active Modes: Depending on the number of errors detected, CAN nodes can switch between error passive and error active modes. This reduces the risk that errant nodes may disrupt the network as a whole.
5. Advanced Error-handling Strategies
Advanced error-handling mechanisms are occasionally utilized to ensure continuous communication.
Fault-Tolerant CAN (FTCAN) is a redundancy-based method that uses two CAN buses running concurrently to ensure that communication continues even if one bus fails. Flex Ray is a communication standard for automotive networks that improves error management; however, it is not a CAN protocol.
6. Security and Error Detection in CAN.
As linked and autonomous vehicles become more common, security concerns have grown. It is vital to understand how error detection relates to security.
Cyber security: To avoid unwanted access and manipulation, robust error detection in CAN and repair mechanisms are required. Malicious attacks on CAN networks are a possibility, emphasizing the need for these measures.
Intrusion Detection Systems: Advanced intrusion detection systems are being integrated into CAN networks to identify and respond to security threats.
7. Future Error Detection and Correction in CAN
The Future of Error Detection As vehicles get more intricate and networked, there are exciting improvements in CAN and CAN correction.
AI-based machine learning algorithms can help discover and rectify problems in real-time, as well as adjust to changing situations and threats.
Blockchain Technology: Researchers are looking into how blockchain may be used for tamper-proof and secure data collection and transfer.

Conclusion
The Heartbeat of Contemporary Vehicles
In conclusion, the Controller Area Network (CAN) is the unsung hero of modern automobiles because it enables critical electrical component communication. Error detection in CAN and corrective methods are unheralded heroes who fight behind the scenes to ensure that this communication is trustworthy, secure, and safe. The importance of effective error management in CAN will only grow as vehicles evolve and incorporate new technology. It’s critical to get from point A to point B safely, effectively, and with the confidence that all of your vehicle’s systems are working properly. This is made feasible by error detection in CAN and repair, which will remain critical to the industry’s future progress.
#CANKeypads#Autonomousdriving#Motorcontrolstrategies#emobilitycontrols#Dorleco#VCUProducts#Sensorfusion#Programablevcu
0 notes
Text
Can 2.0 and Can Fd: Controller Area Network
May 31, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction: Can 2.0 and Can FD.

The Controller Area Network (CAN) protocol has long been the standard method for exchanging data between electronic control units (ECUs) in automotive and industrial communication systems. This technology has evolved to meet the increasing demands of modern automobiles and industrial automation. The transition from CAN 2.0 (Controller Area Network 2.0) to CAN FD (CAN with Flexible Data Rate) is a watershed moment in this history.
In this blog post, we’ll look at the differences between CAN 2.0 and CAN FD, as well as the advantages they provide in terms of data speed, dependability, and adaptability. We will also investigate the causes that led to this decision.
1. Understanding CAN 2.0:
For many years, Controller Area Network 2.0, also known as Classical CAN, was the primary communication protocol used in the industrial and automotive sectors. CAN 2.0 was developed by Bosch in the 1980s to improve communication amongst vehicle ECUs. It was suited for scenarios requiring security and real-time data sharing since it provided a consistent and predictable communication channel.
2. Key Features of the CAN 2.0:

Fixed Data Rate: The fixed data rate of CAN 2.0 is undoubtedly its most significant disadvantage. It has a maximum speed of 1 Mbps, which was sufficient for early industrial and automotive applications but has subsequently become a bottleneck as data requirements have increased over time.
Message Length: CAN 2.0 allows a maximum message length of eight bytes per frame. While this was adequate for sharing simple data, as increasingly complex data, such as high-definition video and sensor data, needed to be conveyed, it became inadequate.
Deterministic and Reliable: One of the advantages of CAN 2.0 is its deterministic nature. Critical information always takes precedence since communications are sent in a precise order with priority. CAN 2.0 has error-checking tools to improve data dependability.
Why CAN FD Is Required: As technology advanced, the limitations of CAN 2.0 became increasingly obvious. The design of CAN FD was motivated by the need for higher data speeds, larger message payloads, and more adaptive communications.
Presenting CAN FD: The advent of CAN FD, or CAN with Flexible Data Rate, intended to address the shortcomings of CAN 2.0 while retaining its primary virtues of dependability and determinism. This new protocol represents significant progress in terms of data transport capabilities and applicability to modern applications.
3. Key Advantages of CAN-FD

Flexible Data Rates: The main advantage is already evident in the name: CAN FD offers flexible data rates. This means that it has a variety of working speeds, including a maximum data rate of 5 Mbps. The ever-increasing data requirements in today’s automobiles and industrial systems must be met, and adaptability is critical.
Extended Message Length: CAN FD allows for longer message payloads because frames can carry up to 64 bytes of data. This greater message length is required for sending complex data over the network, such as high-definition video.
Backward compatibility with CAN 2.0 is one of CAN FD’s brilliant design choices. This enables a smooth transition to the new protocol by allowing older ECUs that use CAN 2.0 to share the same network as newer CAN FD devices.
Increased Network Efficiency: By boosting data transmission rates and message sizes, CAN FD allows networks to be used more effectively, reducing latency and enhancing overall system performance.
4. Implementations of CAN-FD
The introduction of CAN FD has opened up new prospects in a variety of enterprises. Here are some examples of the impact this technology is having:
Can FD be a game changer in the auto industry? Modern automobiles contain a variety of sensors and electrical control units, all of which require a fast and reliable connection. Advanced driver assistance systems (ADAS) and autonomous driving features can send critical data thanks to CAN FD’s adjustable data rates and lengthy message lengths.
Commercial Automation: Can FD provide a dependable industrial automation solution where real-time data transfer is critical? Robots and manufacturing equipment can easily communicate, allowing for accurate control and monitoring of production processes. The protocol’s flexibility allows it to suit the diverse data needs of numerous industrial applications.
Aviation and Defense: Aerospace and defense applications require high levels of dependability and data integrity. CAN FD is an excellent choice for avionics and military systems because of its better error-checking methods and ability to handle large data payloads.
5. Challenges and Things to Consider
Even though CAN-FD has various advantages, there are some issues and factors to consider:
Cost: Updating hardware and software may be required for CAN FD deployment, which can be costly, particularly in industries with large installations.
Complexity: Because of CAN FD’s increased flexibility, network management may become more complicated. For optimal performance, adequate setup and monitoring are required.
Transition Period: For sectors that currently have CAN 2.0 networks in place, the transition to CAN FD may necessitate careful planning to avoid interruptions and ensure backward compatibility.
Conclusion:
Can FD become a crucial invention in the ever-changing realm of automotive and industrial communications? It addresses the drawbacks of its predecessor, CAN 2.0, by allowing for configurable data speeds, larger message durations, and enhanced error detection.
CAN FD’s adaptability and durability make it a critical technology for the future as data transfer demands in both automotive and industrial systems increase? Although the transition from Can 2.0 and Can Fd may be tough, the benefits in terms of speed, efficiency, and adaptability make the investment worthwhile for industries seeking to stay on the cutting edge of technology.
Get to know more about Can 2.0 and Can FD. Checkout for best VCU Products and Services for further details mail us at [email protected] or visit our website, Dorleco.com
#CAN2.0#CANFD#Autonomousdriving#AWD#Motorcontrolstrategies#emobilitycontrols#Dorleco#VCUProducts#Sensorfusion#Programablevcu
0 notes
Text
Motor Control Strategies For All-wheel Drive Systems
May 30, 2024
by dorleco
with no comment
eMOBILITY CONTROLS
Edit
Introduction:

All-wheel drive (AWD) systems, which improve grip, stability, and performance, have become an essential component of many automobiles in the world of automotive engineering. Motor Control Strategies are fundamental to these AWD systems. In this blog post, we will look at the many types of motor control techniques used in AWD systems, including their benefits and how they boost driving dynamics and safety in different weather and road conditions.
The Fundamentals of All-Wheel Drive (AWD) Systems
It is critical to understand the principles of AWD systems before delving into motor control techniques. AWD systems are designed to convey power to all four wheels at the same time, as opposed to conventional two-wheel drive (2WD) cars, which only send power to two of the four wheels. Motor control strategies are used to transfer power among the wheels.
Types of AWD Systems:
Full-Time AWD: These systems permanently distribute power to all four wheels. They are commonly found in crossovers and SUVs. Full-time AWD provides consistent stability and traction, making it ideal for a wide range of driving situations, including rain, snow, and off-road terrain.
Part-time AWD: Systems with part-time AWD allow the driver to switch between two- and all-wheel drive as needed. Off-road vehicles and pickup trucks typically use these systems. When conditions deteriorate, such as on off-road tracks or slick ground, the driver can select AWD.
On-Demand AWD: To save gasoline, on-demand AWD systems generally run in two-wheel drive mode. However, they can instantly and automatically engage the other two wheels to add more traction when wheel slip is detected. Many contemporary sedans and small automobiles use this technique regularly.
Motor Control Strategies for Systems with AWD:
The motor determines strategies in AWD systems that determine how much power is given to each wheel. These approaches are critical for maximizing traction, stability, and performance. Several of the key motor control strategies used in AWD systems are described below.
Open Differential: The simplest and most common type of differential used in automobiles is the open differential. An open differential in an AWD system distributes power equally between the front and rear wheels. While this is effective under typical driving conditions, it may not be the best solution if one wheel loses traction. In these circumstances, the wheel with less traction may get the majority of the power, causing the wheel to spin.
Limited-Slip Differential (LSD): Open differentials have various disadvantages, which limited-slip differentials aim to address. LSDs allow for some variation in wheel speeds, providing the wheel with more power and better traction. They can be mechanical or electronic, and some cutting-edge AWD systems include electronic LSDs that can adjust power distribution in real time based on a variety of factors, like wheel speed, steering input, and throttle position.
Torque Vectoring: Torque vectoring is a more advanced motor control approach than just splitting power between the front and back wheels. It also controls the amount of power sent to the left and right wheels. Torque vectoring improves a vehicle’s handling, cornering, and stability by precisely controlling the torque given to each wheel.
Active AWD Systems: Modern AWD systems usually employ a multitude of sensors and control units to continuously analyze road conditions and driver inputs. When necessary, these systems may easily switch from 2WD to AWD by altering power distribution in real-time. They can also adjust the power distribution between the wheels based on variables such as wheel slip, steering angle, and acceleration.
Advantages of Advanced Motor Control Strategies.
Improved Traction: Advanced Motor Control Strategies improve traction by directing power to the wheels with the most grip. This is especially useful when the ground is sticky from rain, snow, or mud.
Improved Stability: Torque-vectoring AWD systems can improve a car’s stability in tight corners and during quick maneuvers. They reduce the potential for over- or under-steering by controlling power delivery to each wheel.
Optimized Fuel Efficiency: To save petroleum, many modern AWD systems are designed to run mostly in 2WD mode. They maintain traction and fuel efficiency by activating AWD only when necessary.
Versatility: AWD vehicles can handle a wide range of terrains and weather conditions thanks to better motor control methods.
Real-world Applications:
Let’s take a closer look at how various motor control strategies manifest in practical situations:
Off-roading: Torque vectoring and adjustable AWD modes are essential in off-road vehicles such as trucks and SUVs. When traveling rough terrain, steep inclines, or uneven ground, they can distribute power to certain wheels as needed.
Torque vectoring improves handling and traction in high-speed cornering in sports cars equipped with AWD systems. These systems can divide power between the left and right wheels, supporting the vehicle in maintaining its intended path.
Routine Commuting: AWD systems with advanced motor control strategies improve performance and safety even under routine driving circumstances. These devices can prevent wheel spin and loss of control on slick roads, reducing the likelihood of an accident.
Challenges and considerations:
Although motor control techniques have altered AWD systems, there are still certain challenges and factors to consider.
Cost: The high manufacturing and maintenance expenses associated with AWD systems, including complex motor control techniques, may have an impact on the vehicle’s overall cost.
Weight: The additional elements required for AWD systems can make a vehicle heavier, reducing handling and fuel efficiency. Manufacturers are attempting to reduce this by using lightweight materials and effective designs.
Maintenance: Because they have more components that can wear out or need repair than 2WD vehicles, AWD systems may require more maintenance.

Conclusion:
The performance and versatility of all-wheel drive systems in modern automobiles are largely due to motor control techniques. These strategies are at the heart of what makes AWD systems so valuable for drivers, whether it’s improving traction in slick conditions, increasing stability during hard driving, or permitting off-road adventures. As technology advances, we should expect ever more complex motor control algorithms to improve the capabilities of AWD systems, guaranteeing that cars can confidently negotiate a wide range of terrains and weather situations while providing improved handling and safety.
#ADAS#Autonomousdriving#AWD#Motorcontrolstrategies#emobilitycontrols#Dorleco#VCUProducts#Sensorfusion#Programablevcu
0 notes
Text
The Future Of Autonomous Driving And Emobility Controls
May 29, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

Unprecedented changes are emerging in the transportation scene as a result of the convergence of two disruptive technologies: autonomous driving and emobility controls. The combination of self-driving technology and electric vehicles (EVs) has immense promise as the globe strives for efficient and sustainable mobility solutions. The complicated systems that oversee and optimize EVs and charging infrastructure, known as eMobility controls, are key to this transformation.
This blog will look at the future of transportation by delving into the connections between autonomous driving and mobility control systems.
Autonomous Vehicles: A New Mobility Era.
The purpose of autonomous driving technology, often known as self-driving or driverless technology, is to enable vehicles to operate without the need for human intervention. For the technology to perceive the environment, make decisions, and move safely, a combination of sensors, cameras, LiDAR, radar, GPS, and complicated algorithms is used.
The Confluence Between Autonomous Driving and Emobility Controls
Despite being two distinct technologies, autonomous driving, and eMobility controls have the potential to dramatically change transportation systems in a variety of ways.
Effective Route Planning: Autonomous Driving and Emobility Controls can use real-time data from the charging infrastructure to design routes that maximize navigation and charging pauses. This ensures that cars choose the most energy-efficient routes and reduces charging wait times.
Energy-Aware Driving Strategies: To develop energy-efficient driving methods, eMobility controls can work with autonomous driving technology. To maximize efficiency, these strategies consider energy usage, battery state of charge (SoC), and regenerative braking.
Fleet Management Optimization: By implementing eMobility controls, autonomous EV fleets may streamline their operations. A centralized system that handles charging, dispatch, and routing can receive information from vehicles regarding their charge levels, expected arrival times at charging stations, and energy requirements.

Less Human Intervention: Because autonomous driving involves less human engagement, EV drivers can focus on other tasks such as organizing charging sessions or interacting with infotainment systems.
Challenges and Things to Think About
While the combination of autonomous driving and eMobility controls has immense potential, several difficulties must be addressed:
Safety and Redundancy: Integrating eMobility controls with autonomous driving demands robust safety measures and redundancy systems to ensure safe vehicle operation and charging.
Communication and Data Security: Autonomous vehicles and the charging infrastructure must communicate smoothly. It is vital to develop secure communication protocols to prevent unauthorized access and data breaches.
Infrastructure Readiness: For Autonomous Driving And Emobility Controls to completely realize their potential, charging infrastructure must be smoothly integrated with navigation and route planning systems.
Regulatory Framework: To assure safety, liability, and interoperability, the regulatory environment must adapt to the complexities of autonomous driving and bidirectional energy flow.
Future opportunities and synergies
Mobility-as-a-Service (MaaS): Autonomous electric cars (EVs) are easily integrated into MaaS systems, providing on-demand transportation while streamlining charging schedules and energy use.

Intelligent Charging Fleets: Autonomous electric vehicle fleets can act as dynamic charging networks. Vehicles can detect high-demand areas and send electricity to the grid or other vehicles.
Adaptive Driving Modes: To optimize vehicle performance and efficiency, autonomous driving systems can change their driving modes based on energy availability and grid demand. Data-Driven Insights: The data collected by self-driving EVs can provide valuable information regarding driving behaviors, charging habits, and energy consumption, assisting in the development of future mobility policies.

Conclusion
The combination of autonomous driving and emobility controls is a disruptive element that has the potential to transform transportation. We can create a safer, more effective, and environmentally friendly transportation ecosystem by combining the efficiency of electric mobility with the autonomy of self-driving technology. As technology advances, the intersection of these two sectors will accelerate the transition to a future of sustainable and intelligent transportation.
To learn more about Autonomous Driving And Emobility Control Systems, you can email us at [email protected] or visit the website Dorleco.com
0 notes
Text
ADAS Sensor Fusion And Data Integration
Dorlecontrols
5 min read
Just now
May 28, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

The automobile industry is rapidly moving toward safer and more autonomous driving, and advanced driver assistance systems (ADAS) are crucial for improving vehicle safety and driver convenience. ADAS Sensor Fusion and Data Integration are two of the key technological developments that enable ADAS functions.
This blog explores the concept of ADAS sensor fusion, the importance of combining data from several sensors, and how these technologies work together to provide a reliable and comprehensive ecosystem for car safety.
1. Introduction to Advanced Driver Assistance Systems (ADAS)
Over the past few decades, the automotive industry has undergone a revolutionary change from conventional to intelligent vehicles, ushering in the era of Advanced Driver Assistance Systems (ADAS).
These systems use cameras, radars, LiDAR, and other sensors to help drivers navigate the roads more safely and effectively. From adaptive cruise control and lane-keeping assistance to automated parking and accident avoidance, ADAS technology offers a wide range of features.
2. What is ADAS Sensor Fusion?
The act of merging data from many automotive sensors to provide a more accurate and comprehensive image of the surroundings is known as ADAS sensor fusion. Instead of relying just on one sensor, such as a camera or radar, sensor fusion combines data from multiple sources to produce a better representation of the environment surrounding the vehicle. To attain higher levels of safety and independence, perception needs to be considered in its entirety.
3. Types of Sensors in ADAS
ADAS cameras’ types of sensors: To recognize traffic signs, road markings, pedestrians, and other vehicles, cameras are an essential part of ADAS. They offer precise color information and are particularly useful for object recognition and lane detection.
Radar: Radar sensors measure an object’s direction, speed, and distance from a moving vehicle using radio waves. In inclement weather, they come in quite handy since they can locate objects that are out of sight.
LiDAR: Light Detection and Ranging (LiDAR) sensors employ laser beams to create an extensive three-dimensional map of the region surrounding the vehicle. LiDAR is quite accurate in estimating distances and provides a high-resolution image of the surrounding area.
Ultrasonic Sensors: Ultrasonic sensors are widely used in low-speed maneuvers to help with parking, estimate object distance, and provide feedback to the driver
Sensor fusion — the process of combining data from multiple sensors—is crucial to overcoming the limitations of individual sensors. To reduce false positives and negatives and improve judgment, ADAS systems integrate data from multiple sensor types, each of which has pros and cons.
For example, even while cameras are highly accurate in recognizing things, they can struggle in low light or glare. Radar, on the other hand, is less detailed than cameras yet still functions well in inclement weather. By merging the data from both sensors, the system can compensate for the inadequacies of each one and provide a more reliable and accurate representation of the surroundings.
4. Difficulties with ADAS Sensor Fusion
While sensor fusion provides benefits, there are significant issues that need to be resolved. Combining data from several sensors requires sophisticated algorithms and strong processors. The precise and low-latency real-time processing of large amounts of data is a difficult task requiring sophisticated computing capabilities.
The sensors’ synchronization and calibration are also essential for a successful sensor fusion. All sensors need to be perfectly synced and aligned to facilitate trustworthy data integration and decision-making.
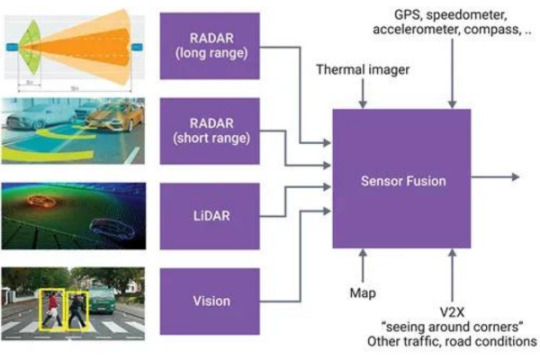
5. Integration of ADAS Data
In ADAS, data integration goes beyond sensor fusion and combines information from several sensors. Furthermore, information from several automotive systems, including GPS, IMUs, and ECUs (Electronic Control Units), needs to be integrated.
It is feasible to fully comprehend the position, orientation, and dynamics of the vehicle in its setting by utilizing data from several systems and sensor inputs.
6. Operation of ADAS Sensor Fusion and Data Integration
The ADAS sensor fusion and data integration procedure can be broadly divided into the following steps:
Data collection: All of the car’s sensors are continuously taking in information about their environment. LiDAR scans the environment, cameras take pictures, radar finds objects and ultrasonic sensors measure distances.
Pre-processing: Raw data from sensors is first treated to remove noise, correct distortions, and give a standard coordinate system.
Object Detection and Tracking: Using computer vision and machine learning methods, the system detects and tracks objects in its environment. This step involves identifying people, vehicles, lane markers, traffic signs, and other significant objects.
Sensor Fusion: Data from all sensors is combined to create an accurate and comprehensive image of the surrounding region after objects have been discovered and tracked. This integration helps to dispel uncertainty and skepticism.
Environmental Perception: A real-time, comprehensive model of the environment surrounding the vehicle is produced using the combined data. The positions, speeds, and trajectories of numerous objects are included in this model.
Making decisions: Based on its perception of the surroundings, the ADAS system determines whether to assist the driver or to start automatic functions, such as adjusting the vehicle’s speed, steering, or braking to avoid collisions.
7. Benefits and Opportunities for ADAS Sensor Fusion and Data Integration
With so much promise, ADAS sensor fusion and data integration have already significantly increased road safety and driver comfort. By providing a more complete and accurate picture of the surroundings, ADAS systems can help prevent accidents, reduce traffic congestion, and improve overall road efficiency.
As technology advances, we might expect increasingly sophisticated algorithms and sensors to allow for greater degrees of autonomy, ultimately leading to fully autonomous vehicles.
Furthermore, the integration of Vehicle-to-Everything (V2X) connectivity and ADAS will enable cooperative systems where vehicles may exchange data with each other and the infrastructure for even greater safety and efficiency.
Conclusion:
ADAS sensor fusion and data integration have revolutionized the automobile industry, improving vehicle safety and paving the way for autonomous driving.
By combining data from multiple sensors and vehicle systems, ADAS can accurately identify the environment, make sound decisions, and assist drivers more effectively.
As technology advances, we may expect ADAS to play an increasingly vital role in the development of safer, more intelligent, and more effective mobility solutions for all drivers.
To explore our best VCU products and services, mail us at [email protected] or visit our website, Dorleco.com for further details.
0 notes