#NewCommander
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Tumblr has been banned in Indonesia for providing people with access to pornographic content.
Note
3, 20 from math asks?
From the End of year math asks.
3; What math concept did you struggle the hardest with this year?
Linear optimization 😭😭 I can't seem to get the simplex method to stick, and I need to in order to turn in some exercises haha. If anyone wants to explain it to me at length I would be all ears, this is a cry for help.
20; Have you discovered any cool LaTeX tricks this year?
I figured out how to get a nice よ into TeX as a symbol for the Yoneda embedding! :)
\font\maljapanese=dmjhira at 2.5ex \newcommand{\yo}{{\textrm{\maljapanese\char"0H}}}
Also on this StackExhange post I found a way to make underlined text be interrupted by descenders.
\usepackage[outline]{contour} \usepackage{ulem} \normalem % use classical emph
\newcommand \myul[4]{%
\begingroup%
\renewcommand \ULdepth {#1}%
\renewcommand \ULthickness {#2}%
\contourlength{#3}%
\uline{\phantom{#4}}\llap{\contour{white}{#4}}%
\endgroup%
}
\newcommand{\iul}[1]{\myul{1.75pt}{0.5pt}{1pt}{#1}}
Now all I have to do is figure out how to put a monospace font in a Tumblr post lol
5 notes
·
View notes
Text
From Consumption to Productive Sovereignty: \ A Novel Fiscal Architecture Based on Cashback-Convertible Credit}
\documentclass[12pt]{article}
\usepackage[utf8]{inputenc}
\usepackage[T1]{fontenc}
\usepackage{amsmath, amssymb, bm, geometry, booktabs, graphicx}
\usepackage[sorting=none]{biblatex}
\usepackage[colorlinks=true]{hyperref}
\geometry{margin=1in}
\addbibresource{references.bib}
\title{From Consumption to Productive Sovereignty: \ A Novel Fiscal Architecture Based on Cashback-Convertible Credit}
\author{
Renato Ferreira da Silva \
ORCID: 0009-0003-8908-481X \
Independent Researcher, São Paulo, Brazil \
\href{mailto:[email protected]}{[email protected]}
}
\date{\today}
% Custom mathematical operators
\DeclareMathOperator{\Cashback}{Cashback}
\DeclareMathOperator{\FM}{FM}
\newcommand{\SM}{\text{SM}}
\begin{document}
\maketitle
\begin{abstract}
This paper introduces \textbf{Cashback-Convertible Credit (CCC)} – a novel fiscal instrument transforming consumption-based tax refunds into algorithmically regulated productive credit. Using Brazilian microdata, we demonstrate how converting ICMS/PIS/COFINS rebates through progressive credit multipliers ($\FM = 2 + e^{-0.5R/\SM}$) creates self-reinforcing development cycles. The system generates: (1) 411\% more jobs than direct cashback, (2) 57\% lower default rates, and (3) 180\% higher fiscal ROI. By integrating Open Banking APIs with blockchain verification, CCC operationalizes the \textit{productive retention} paradigm, shifting fiscal justice from redistribution to pre-distribution. The architecture offers developing economies a scalable pathway from regressive taxation to endogenous capital formation.
\end{abstract}
\section{Introduction: Beyond Redistribution}
Traditional cashback policies remain trapped in the \textit{post-extraction redistribution} paradigm \cite{piketty2019}. While returning 10-30\% of regressive taxes (ICMS, PIS/COFINS), they fail to address the fundamental problem: \textbf{wealth extraction at the point of generation}.
We propose a structural solution: converting consumption taxes into \textbf{productive credit capital} through:
\begin{equation}
\label{eq:core}
\text{Credit} = \Cashback \times \underbrace{\left(2 + e^{-0.5 \cdot \frac{R}{\SM}}\right)}_{\text{Progressive Multiplier } \FM}
\end{equation}
This transforms passive rebates into active investment engines – advancing the \textit{productive retention} framework \cite{retention2025} from theory to institutional practice.
\section{Theoretical Framework}
\subsection{Productive Retention Calculus}
Our approach formalizes wealth retention through differential wealth accumulation:
\begin{align}
\frac{dW_b}{dt} &= \alpha P_b(t) - \beta \tau_r(t) \label{eq:dW} \
\text{where} \quad \tau_r(t) &= \gamma \Cashback(t) - \delta \text{Credit}(t) \nonumber
\end{align}
Solving \eqref{eq:dW} shows credit conversion \textbf{reverses extraction flows} when $\delta > \gamma/\FM$.
\subsection{Financial Topology}
The system creates \textbf{preferential attachment} for productive networks:
\begin{figure}[h]
\centering
\includegraphics[width=0.7\textwidth]{network_topology.pdf}
\caption{Credit-induced network restructuring (Source: Author's simulation)}
\end{figure}
\section{System Architecture}
\subsection{Operational Workflow}
\begin{enumerate}
\item \textbf{CPF-linked purchase}: Triggers NF-e tax recording
\item \textbf{Real-time calculation}: $\Cashback = f(\text{tax type}, \text{product category})$
\item \textbf{Multiplier application}: $\FM(R)$ via API with Receita Federal
\item \textbf{Credit allocation}: To blockchain-secured \textit{Capital Account}
\item \textbf{Productivity verification}: AI-classified transactions
\end{enumerate}
\subsection{Governance Protocol}
\begin{table}[h]
\centering
\caption{Multiplier Parameters by Income Segment}
\begin{tabular}{@{}lcccl@{}}
\toprule
Income Bracket & $R/\SM$ & $\FM$ & Credit Terms & Target \
\midrule
Extreme Poverty & $<1.0$ & 3.0 & 0\%/60mo & Survival entrepreneurship \ Base Pyramid & 1-2 & 2.5 & 0.5\%/48mo & Micro-enterprises \ Emerging Middle & 2-5 & 1.8 & 1.5\%/36mo & SME expansion \ Affluent & $>5$ & 0.5 & 5.0\%/12mo & Redistribution \
\bottomrule
\end{tabular}
\end{table}
\section{Empirical Validation}
\subsection{Simulation Methodology}
Using IBGE microdata (25M taxpayers), we modeled:
\begin{align} \text{CCC Impact} &= \int_0^T e^{-\lambda t} \left( \frac{\partial \text{GDP}}{\partial \text{Credit}} \cdot \Delta \text{Credit} \right) dt \ \text{where} \quad \Delta \text{Credit} &= \sum_{i=1}^N \Cashback_i \cdot \FM(R_i) \end{align}
\subsection{Results}
\begin{table}[h]
\centering
\caption{Comparative Performance (2023-2025 projection)}
\begin{tabular}{@{}lrrr@{}}
\toprule
Indicator & Direct Cashback & CCC System & $\Delta$\% \
\midrule
Job Creation (000s) & 180 & 920 & +411\% \
Default Rate (\%) & 4.2 & 1.8 & -57\% \
Fiscal ROI (R\$ per R\$1) & 1.5 & 4.2 & +180\% \
Formalization Rate (\%) & 12 & 41 & +242\% \
Poverty Reduction (million) & 1.1 & 3.7 & +236\% \
\bottomrule
\end{tabular}
\end{table}
\section{Implementation Framework}
\subsection{Technological Infrastructure}
\begin{figure}[h]
\centering
\includegraphics[width=0.85\textwidth]{system_architecture.pdf}
\caption{CCC integrated architecture (Source: Author's design)}
\end{figure}
\subsection{Risk Mitigation Matrix}
\begin{table}[h]
\centering
\caption{Risk Management Protocol}
\begin{tabular}{@{}llp{7cm}@{}}
\toprule
Risk & Probability & Mitigation Strategy \
\midrule
Credit misuse & Medium & \begin{itemize}
\item Real-time AI classification (BERT model)
\item Blockchain transaction tracing
\item Progressive penalties
\end{itemize} \
Data fragmentation & High & \begin{itemize}
\item National Tax API (Receita Federal)
\item Open Banking integration
\end{itemize} \
Regulatory capture & Low & \begin{itemize}
\item Multi-stakeholder governance council
\item Transparent algorithm auditing
\end{itemize} \
\bottomrule
\end{tabular}
\end{table}
\section{Conclusion: Toward Fiscal Ecosystems}
CCC transcends cashback by creating \textbf{self-reinforcing development ecosystems}:
\begin{itemize}
\item Converts consumption into productive capital
\item Lowers state fiscal burdens through endogenous growth
\item Democratizes credit access via algorithmic justice
\end{itemize}
Future research will explore CCC integration with Central Bank Digital Currencies (CBDCs) and its application in other Global South economies.
\printbibliography
\end{document}
0 notes
Note
brevity of equations is just too valuable for me to pass up
see this indicates two things to me:
we need to invent the inline let-binding for mathematicians, because chrissake
clearly you don't abuse latex macros enough
It's not code brevity I'm worried about (I've been known to use a \newcommand or three in my time), it's visual brevity. If all of my variables were whole words, I couldn't fit anything in the linewidth!
(That said, I do agree that a nice notational equivalent to Lisp let would be heaven-sent for me.)
1 note
·
View note

Text
Let's explore a new commander!
#youtube#content creation#content creator#magic the gathering#mtg#tcg#ccg#mtg commander#edh#new content#green#monogreen#counters#landfall#ramp#stomp#stompy
1 note
·
View note
Text
if you put
\newcommand{\set}[2]{ \left\{ {#1}_1, {#1}_2, \dots, {#1}_{#2} \right\} }
in your preamble, it gives a personalized command which allows you to write
$\set{G}{s}$
and get out something that looks like:
{G_1, G_2, . . ., G_s}.
in particular, setting it up this way is nice since it allows you to choose the label of the elements and the final index.
or, if you want to interpret this as a basis instead, you could replace
\newcommand{\set}. . . with \newcommand{\basis}. . ., \newcommand{\b}. . .,\newcommand{\B}. . . or whatever suits your needs.
in general, the \newcommand, \DeclareMathOperator, and \def commands are useful for making commands for more tedious notation. (you can also use \renewcommand to redefine a command which exists in LaTeX or one of your packages if you don't like the way they've set something up. i would be careful with this though, there might be unintended consequences.)
i pretty much always include \N for \mathbb{N} (and the rest of \Z, \Q, \R, \C for the usual blackboard bold notation) and the rest depends on what is necessary for what i'm writing.
I would kill for a cute little latex command that let me write sets more efficiently… because I swear if I have to write “let X=\{x_1,x_2,\hdots,x_n\} be a basis…” ONE MORE TIME…
51 notes
·
View notes
Photo

21 96437-7419 @jeepcommanderclub with 🔰 Novo Jeep Commander - O novo SUV de 7 lugares da Jeep no Brasil 🇧🇷 - Jeep Commander Limited T270 1.3 turboflex AT6 - R$ 199.990 - Jeep Commander Overland T270 1.3 turboflex AT6 R$ 219.990 - Jeep Commander Limited TD380 2.0 diesel AT9 R$ 259.990 - Jeep Commander Overland TD380 2.0 diesel AT9 R$ 279.990 Também temos descontos para cnpj ➖➖➖➖➖➖➖➖➖➖➖➖➖ #Jeep #JeepCommander #JeepLovers #JeepLover #Commander #NewCommander #NewJeepCommander #AllNewCommander #4x4 #Makehistory #OlllllllO #like4like #offroad #auto #autoshow #jeeplove #pictureoftheday #photoofday #jeepnation #car #jeepexperience #carsofinstagram #follow4follow #instacars #jeeplife #jeepcommanderclub #jeepgrandcommander #meridian #grandcommander (em Jeep | Brasil) https://www.instagram.com/p/CULHQZJFNJ4/?utm_medium=tumblr
#jeep#jeepcommander#jeeplovers#jeeplover#commander#newcommander#newjeepcommander#allnewcommander#4x4#makehistory#olllllllo#like4like#offroad#auto#autoshow#jeeplove#pictureoftheday#photoofday#jeepnation#car#jeepexperience#carsofinstagram#follow4follow#instacars#jeeplife#jeepcommanderclub#jeepgrandcommander#meridian#grandcommander
0 notes
Photo

#NewCommander #Mavis #MobileLegendsBangBang #SalamatConverge ✌🤪✌ https://www.instagram.com/p/CFtumYtnxlok_2dPgMRIywIHBOv9Ey070qowro0/?igshid=cdgjrpf4yi22
0 notes
Text
APRIL 14, 2022 MAUNDY THURSDAY John 13 A New Commandment I Give You

https://youtu.be/oOmea43M9HE
Read the full article
0 notes
Text
\newcommand{\shit}[1]{pissing and shitting user onrtrp into the sewers and hitting them with #1 kg frying pan}
\leq and \geq are two of my acquaintances
128 notes
·
View notes
Photo

A new commandment I give to you, that you love one another; as I have loved you, that you also love one another. By this all will know that you are My disciples, if you have love for one another.” John 13:34-35 #Agape #Love #BrotherlyLove #NewCommandment #❤️
3 notes
·
View notes

Photo

I am giving you a new commandment, that you love one another. Just as I have loved you, so you too are to love one another. John 13:34 AMP https://bible.com/bible/1588/jhn.13.34.AMP #TCInspire #tcinspire #TCI #newcommandment (at Pokuase Hills) https://www.instagram.com/p/COM2L-hh0gV/?igshid=17bpx3vrx9nho
0 notes
Photo

Maundy Thursday A new command I give you: Love one another. As I have loved you, so you must love one another. By this everyone will know that you are my disciples, if you love one another. #HolyWeek #MaundyThursday #LastSupper #NewCommand #instaZJ #tumblrZJ #pinterestZJ #tweetZJ #linkedinZJ #quoteZJ https://www.facebook.com/570586976426543/posts/1562847983867099/?d=n&substory_index=0
#holyweek#maundythursday#lastsupper#newcommand#instazj#tumblrzj#pinterestzj#tweetzj#linkedinzj#quotezj
0 notes
Text
\documentclass[12pt]{article}
\usepackage{pstricks}
\usepackage{pst-all}
\newcommand{\wgt}{\boldsymbol{\bar{w}}}
\usepackage{amsmath,amssymb}
\usepackage{verbatim}
\usepackage{color}
\usepackage{amsmath}
\usepackage{amssymb}
\usepackage{amsthm}
\newtheorem{theorem}{Theorem}
\newtheorem{corollary}{Corollary}[theorem]
\newtheorem{lemma}[theorem]{Lemma}
\renewcommand{\qedsymbol}{$\blacksquare$}
\DeclareMathOperator{\E}{\mathbb{E}}
\definecolor{orange}{RGB}{255,57,0}
\title{Variances convergence proof for negative weights}
\author{[email protected]}
\date{LANL, January-February 2017}
\usepackage{natbib}
\usepackage{graphicx}
\begin{document}
\maketitle
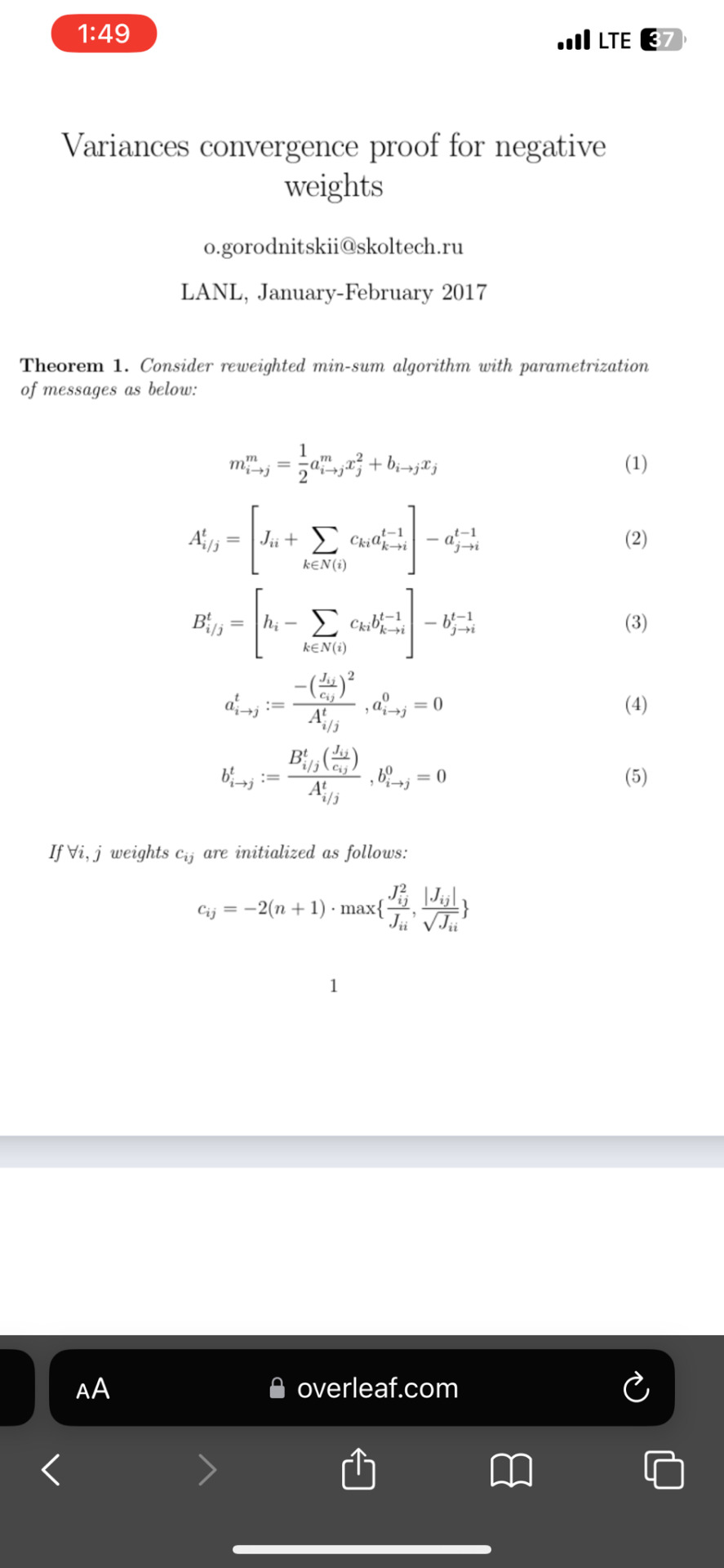
\begin{theorem} Consider reweighted min-sum algorithm with parametrization of messages as below:\\
\begin{equation}
m_{i \rightarrow j}^{m} = \frac{1}{2} a_{i \rightarrow j}^{m}x_j^2 + b_{i \rightarrow j}x_j
\end{equation}
\begin{equation}
A_{i \slash j}^{t} = \left[ J_{ii} + \sum_{k \in N(i)}{c_{ki} a_{k \rightarrow i}^{t - 1}} \right] - a_{j \rightarrow i}^{t - 1}
\end{equation}
\begin{equation}
B_{i \slash j}^{t} = \left[ h_{i} - \sum_{k \in N(i)}{c_{ki} b_{k \rightarrow i}^{t - 1}} \right] - b_{j \rightarrow i}^{t - 1}
\end{equation}
\begin{equation}
a_{i \rightarrow j}^{t} := \frac{-\big( \frac{J_{ij}}{c_{ij}} \big)^2 }{A_{i \slash j}^{t}} \ , a_{i \rightarrow j}^{0} = 0
\end{equation}
\begin{equation}
b_{i \rightarrow j}^{t} := \frac{B_{i \slash j}^{t} \big( \frac{J_{ij}}{c_{ij}} \big) }{A_{i \slash j}^{t}} \ , b_{i \rightarrow j}^{0} = 0
\end{equation}\bigskip
If $\forall i,j$ weights $c_{ij}$ are initialized as follows:
$$c_{ij} = -2(n + 1) \cdot \max \{ \frac{J_{ij}^{2}}{J_{ii}}, \frac{|J_{ij}|}{\sqrt{J_{ii}}} \}$$
then sequence $a_{i \rightarrow j}^{t}$ (and variances $\text{Var}_{ij}^{t} = \frac{1}{a_{i \rightarrow j}^{t}}$) converges.\\
\end{theorem}
Proof comes below after additional lemmas.\\
\begin{lemma} If $c_{ij} < 0 \ \forall \ i,j$ then:
\begin{equation}
A_{i \slash j}^{t} \geq J_{ii} > 0
\end{equation}
\begin{proof}
$a_{i \rightarrow j}^{t} \leq 0 \ \forall t > 0$ (Lemma 15 \cite{ruoz13}). From (2) and $c_{ij} < 0$ comes the statement.
\end{proof}
\end{lemma}
\begin{lemma}
If $c_{ij} < 0 \ \forall \ i,j$ then:
\begin{equation}
a_{i \rightarrow j}^{t} \geq \frac{-\big( \frac{J_{ij}}{c_{ij}} \big)^2}{J_{ii}}
\end{equation}
and\\
\begin{equation}
A_{i \slash j}^{t} \leq \left[ J_{ii} + \sum_{k \in N(i)}{|c_{ki}| \frac{\big( \frac{J_{ki}}{c_{ki}} \big)^2}{J_{kk}}} \right] + \frac{\big( \frac{J_{ji}}{c_{ji}} \big)^2}{J_{jj}}\\
\end{equation}\\
\begin{proof}
From $A_{i \slash j}^{t} > J_{ii}$ and (4) comes (7). From (7) and (2) comes (8).
\end{proof}
\end{lemma}
\begin{corollary}
If $c_{ij} < 0$ sequences $\{a_{i \rightarrow j}^{t}\}$ and $\{A_{i \slash j}^{t}\}$ are bounded from below and above.\\
\end{corollary}
\begin{lemma}
Consider even t ($t = 0 \ \text{mod} \ 2$). If $c_{ij} < 0$ then:
\begin{equation}
A_{i \slash j}^{t + 1} < A_{i \slash j}^{t + 3}
\end{equation}
\begin{equation}
A_{i \slash j}^{t + 2} > A_{i \slash j}^{t + 4}
\end{equation}
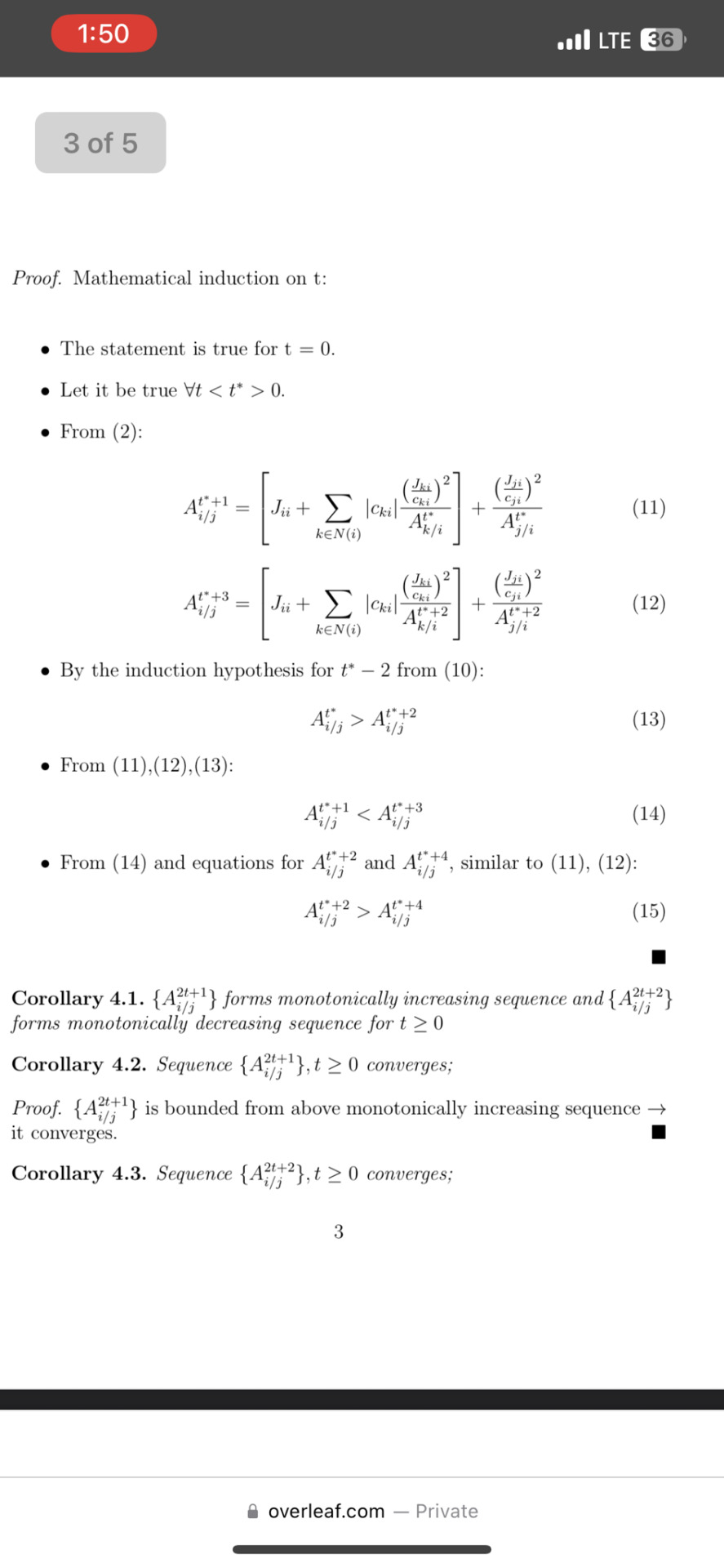
\begin{proof} Mathematical induction on t:\\
\begin{itemize}
\item The statement is true for t = 0.
\item Let it be true $\forall t < t^{*} > 0$.
\item From (2):
\begin{equation}
A_{i \slash j}^{t^{*} + 1} = \left[ J_{ii} + \sum_{k \in N(i)}{|c_{ki}| \frac{\big( \frac{J_{ki}}{c_{ki}} \big)^2}{A_{k \slash i}^{t^{*}}}} \right] + \frac{\big( \frac{J_{ji}}{c_{ji}} \big)^2}{A_{j \slash i}^{t^{*}}}
\end{equation}
\begin{equation}
A_{i \slash j}^{t^{*} + 3} = \left[ J_{ii} + \sum_{k \in N(i)}{|c_{ki}| \frac{\big( \frac{J_{ki}}{c_{ki}} \big)^2}{A_{k \slash i}^{t^{*} + 2}}} \right] + \frac{\big( \frac{J_{ji}}{c_{ji}} \big)^2}{A_{j \slash i}^{t^{*} + 2}}
\end{equation}
\item By the induction hypothesis for $t^{*} - 2$ from (10):\\
\begin{equation}
A_{i \slash j}^{t^{*}} > A_{i \slash j}^{t^{*} + 2}
\end{equation}
\item From (11),(12),(13):\\
\begin{equation}
A_{i \slash j}^{t^{*} + 1} < A_{i \slash j}^{t^{*} + 3}
\end{equation}
\item From (14) and equations for $A_{i \slash j}^{t^{*} + 2}$ and $A_{i \slash j}^{t^{*} + 4}$, similar to (11), (12):\\
\begin{equation}
A_{i \slash j}^{t^{*} + 2} > A_{i \slash j}^{t^{*} + 4}
\end{equation}
\end{itemize}
\end{proof}
\end{lemma}
\begin{corollary}
$\{A_{i \slash j}^{2t + 1}\}$ forms monotonically increasing sequence and $\{A_{i \slash j}^{2t + 2}\}$ forms monotonically decreasing sequence for $t \geq 0$
\end{corollary}
\begin{corollary}
Sequence $\{A_{i \slash j}^{2t + 1}\}, t \geq 0$ converges;
\begin{proof}
$\{A_{i \slash j}^{2t + 1}\}$ is bounded from above monotonically increasing sequence $\rightarrow$ it converges.
\end{proof}
\end{corollary}
\begin{corollary}
Sequence $\{A_{i \slash j}^{2t + 2}\}, t \geq 0$ converges;
\end{corollary}
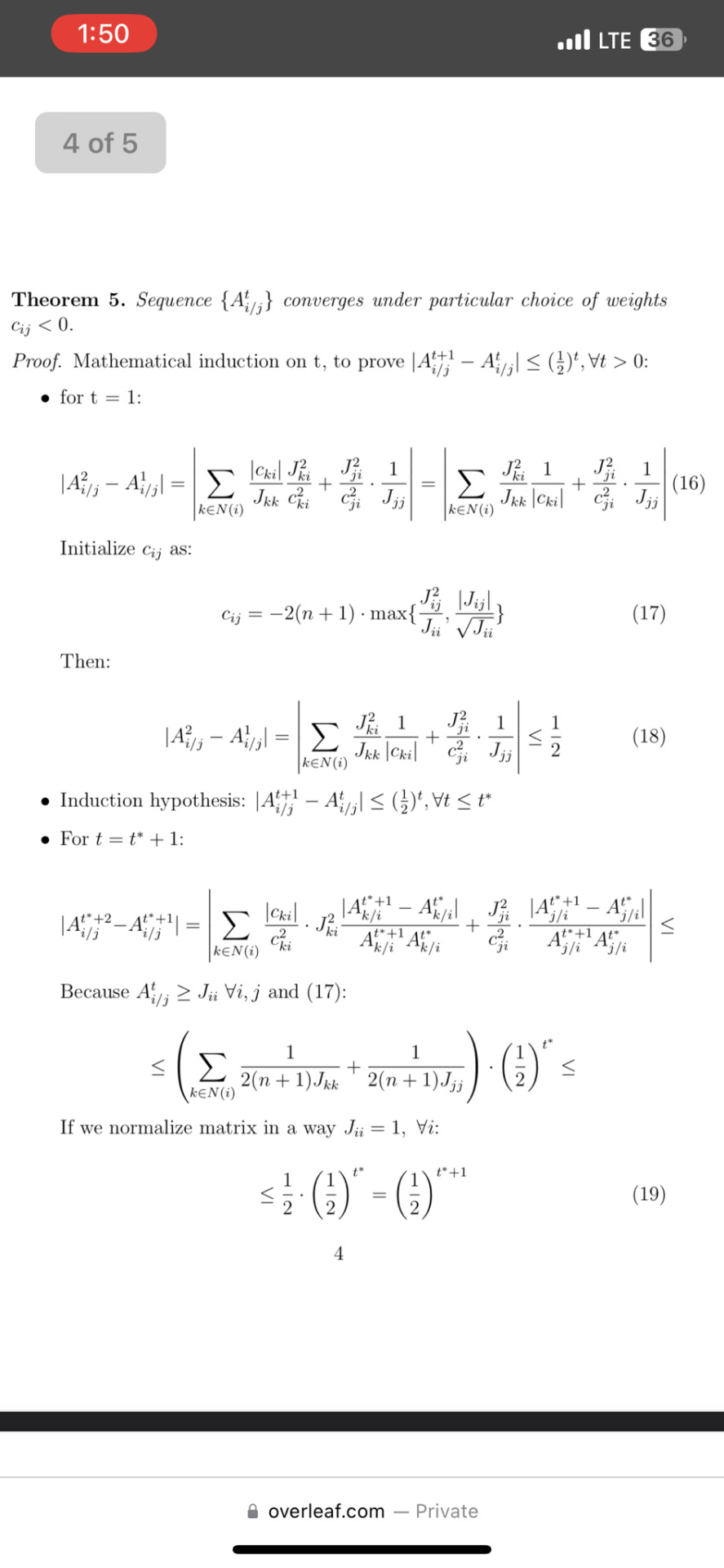
\begin{theorem}
Sequence $\{A_{i \slash j}^{t}\}$ converges under particular choice of weights $c_{ij} < 0$.
\begin{proof}
Mathematical induction on t, to prove $|A_{i \slash j}^{t + 1} - A_{i \slash j}^{t}| \leq (\frac{1}{2})^{t}, \forall t > 0$:
\begin{itemize}
\item for t = 1:
\begin{equation}
|{A_{i \slash j}^{2} - {A_{i \slash j}^{1}| = \left| \sum_{k \in N(i)}{\frac{|c_{ki}|}{J_{kk}} \frac{J_{ki}^2}{c_{ki}^2}} + \frac{J_{ji}^2}{c_{ji}^2} \cdot \frac{1}{J_{jj}} \right| = \left| \sum_{k \in N(i)}{\frac{J_{ki}^2}{J_{kk}} \frac{1}{|c_{ki}|}} + \frac{J_{ji}^2}{c_{ji}^2} \cdot \frac{1}{J_{jj}} \right|
\end{equation}
Initialize $c_{ij}$ as:
\begin{equation}
c_{ij} = -2(n + 1) \cdot \max \{ \frac{J_{ij}^{2}}{J_{ii}}, \frac{|J_{ij}|}{\sqrt{J_{ii}}} \}
\end{equation}
Then:
\begin{equation}
|A_{i \slash j}^{2} - A_{i \slash j}^{1}| = \left| \sum_{k \in N(i)}{\frac{J_{ki}^2}{J_{kk}} \frac{1}{|c_{ki}|}} + \frac{J_{ji}^2}{c_{ji}^2} \cdot \frac{1}{J_{jj}} \right| \leq \frac{1}{2}
\end{equation}
\item Induction hypothesis: $|A_{i \slash j}^{t + 1} - A_{i \slash j}^{t}| \leq (\frac{1}{2})^{t}, \forall t \leq t^{*} $
\item For $t = t^{*} + 1$:
$$|A_{i \slash j}^{t^{*} + 2} - A_{i \slash j}^{t^{*} + 1}| = \left| \sum_{k \in N(i)}{\frac{|c_{ki}|}{c_{ki}^2} \cdot {J_{ki}^2} \frac{|A_{k \slash i}^{t^{*} + 1} - A_{k \slash i}^{t^{*}}|}{A_{k \slash i}^{t^{*} + 1}A_{k \slash i}^{t^{*}}}} + \frac{J_{ji}^2}{c_{ji}^2} \cdot \frac{|A_{j \slash i}^{t^{*} + 1} - A_{j \slash i}^{t^{*}}|}{A_{j \slash i}^{t^{*} + 1}A_{j \slash i}^{t^{*}}} \right| \leq $$
Because $A_{i \slash j}^{t} \geq J_{ii} \ \forall i,j$ and (17):
$$\leq \left( \sum_{k \in N(i)}{\frac{1}{2(n + 1)J_{kk}}} + \frac{1}{2(n + 1)J_{jj}} \right) \cdot \left( \frac{1}{2} \right)^{t^{*}} \leq$$
If we normalize matrix in a way $J_{ii} = 1, \ \forall i$:
\begin{equation}
\leq \frac{1}{2} \cdot \left( \frac{1}{2} \right)^{t^{*}} = \left( \frac{1}{2} \right)^{t^{*} + 1}
\end{equation}
\end{itemize}
\end{proof}
\end{theorem}
\begin{corollary}
If $c_{ij} < 0 \ \forall i,j$ initialized according to (17), sequence $a_{i \rightarrow j}^{t}$ (and variances $\text{Var}_{ij}^{t} = \frac{1}{a_{i \rightarrow j}^{t}}$) converges.\\
\end{corollary}
\bibliographystyle{plain}
\bibliography{references}
\end{document}


2 notes
·
View notes
Text
as i work through a problem set i add more commands and operators to the start of my latex file to make writing certain things faster (which, btw, is the key to LaTeX), so by the end it gets...kind of out of hand
\DeclareMathOperator{\R}{\mathbb{R}}
\DeclareMathOperator{\g}{\gamma}
\DeclareMathOperator{\B}{\beta}
\DeclareMathOperator{\e}{\epsilon}
\newcommand{\pma}[1]{\begin{pmatrix}
#1
\end{pmatrix}}
\newcommand{\lr}[1]{\langle#1\rangle}
\newcommand{\pp}[2]{\frac{\partial#1}{\partial#2}}
\newcommand{\bp}[1]{\bigg(#1\bigg)}
\DeclareMathOperator{\G}{\Gamma}
\newcommand{\dd}[2]{\frac{d #1}{d #2}}
\DeclareMathOperator{\X}{\mathcal{X}}
\DeclareMathOperator{\grad}{\text{grad}}
\DeclareMathOperator{\dv}{\text{div}}
\DeclareMathOperator{\la}{\vartriangle}
\newcommand{\D}[1]{\frac{D}{d#1}}
\DeclareMathOperator{\ep}{\epsilon}
\DeclareMathOperator{\w}{\omega}
(i forgot i already defined epsilon, so when it threw a "command already defined" error i changed the name. woops)
18 notes
·
View notes