#radarsensor
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs




Fun Fact
70% of Tumblr users say the Dashboard is their favorite place to spend time online.
Text
UFO Lighting INC's industry-leading LED shoebox light technology has now been applied to the Denver
UFO Lighting INC's industry-leading LED shoe box light technology has now been applied to the Denver Tennis Court, bringing a whole new level of brilliance to this hallowed tennis arena. Our LED shoebox lights not only add a vibrant touch to the court but also infuse the games with an intense and thrilling atmosphere. This LED shoebox light is IP65 waterproof and comes equipped with solar panels, allowing it to store solar energy during the day and release it at night. This not only aids in energy conservation but also helps reduce electricity costs. Moreover, the large-capacity lithium battery ensures extended illumination without the need for frequent recharging.
#UFO#Lighting#LED#ShoeboxLights#DenverTennisCourt#Illumination#SolarPower#Technology#OutdoorLighting#RadarSensor#EnergyEfficiency#Environment#Innovation#brighterworld
1 note
·
View note
Text
Sensors in Autonomous Vehicles
April 5, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction
The entire discussion on sensors in autonomous vehicles consists of one major point: will the vehicle’s brain (i.e., the computer) be able to make decisions just like a human brain does? Whether a computer can make these decisions is an altogether different topic. Still, it is just as important for an automotive company working on self-driving technology to provide the computer with the necessary and sufficient data to make decisions.
This is where sensors, particularly their integration with the computing system, come into the picture.
Sensor Types in Self-Driving Cars:
Autonomous vehicles employ three primary types of sensors to map their surroundings: radio-based (radar), vision-based (cameras), and light- and laser-based (LiDAR).

The following is a quick explanation of these three types of sensors found in autonomous vehicles:
1. Cameras
A 360° view of the vehicle’s surroundings can be obtained by installing high-resolution video cameras in various places around the body of the vehicle. They take pictures and give the information needed to recognize various items on the road, like people, traffic lights, and other cars.
The ability to precisely identify things is the primary benefit of utilizing data from high-resolution cameras, and this ability is utilized to map 3D representations of the environment around the vehicle. However, in bad weather—such as at night or during periods of intense rain or fog—these cameras don’t function as precisely.
Sensors based on vision that are used:
Monocular vision sensor one-sided vision One camera is used by sensors in autonomous vehicles to assist in the detection of moving objects, such as pedestrians and cars. This system will only detect categorized things because it mostly depends on object classification. By simulating millions of kilometers of travel, these algorithms may be trained to identify and categorize items. It identifies items by comparing their sizes to those that are recorded in its memory. As an illustration, suppose that an object is identified by the system as a truck. The technology may compare the size of the new truck with the size of the old truck and determine the distance based on this information. On the other hand, an object that the system is unable to classify will remain unnoticed. Developers of autonomous systems are quite concerned about this.
Stereo vision sensorA dual-camera arrangement seen in a stereo vision system aids in precisely estimating the distance to an object even when the system is unable to identify what it is. The device serves as a human eye and aids in determining an object’s depth because it has two separate lenses. The system can use triangulation to determine the distance between the object and the camera because the two lenses record slightly different images.

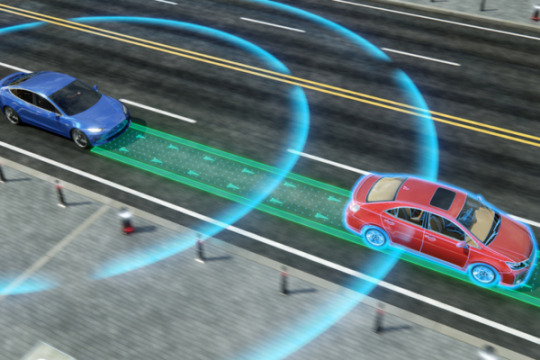
Radar Sensors for Self-Driving Cars Autonomous vehicles equipped with radar sensors employ radio waves to scan their surroundings and determine the precise size, angle, and velocity of objects. The object’s size, velocity, and distance from the host vehicle are all determined by the sensor, which emits radio waves through a transmitter inside and measures how long it takes for the waves to be reflected.Radar sensors have been employed in ocean navigation and weather forecasting in the past. This is because it outperforms vision-based sensors due to its very consistent performance under a wide range of weather conditions.
One way to categorize RADAR sensors is by their operational distance ranges:
The main benefit of short-range radar (SRR) sensors is that they can detect pictures with a high degree of resolution, covering a range of 0.2 to 30 meters.
This is crucial since, at low resolutions, it might not be possible to identify a pedestrian who is in front of a larger item.
MRR (Medium Range Radar): 30 to 80 meters Long-Range Radar (LRR): (80m to more than 200m) These sensors work well with highway Automatic Emergency Braking (AEB) and Adaptive Cruise Control (ACC) systems.
2. LiDAR sensors
There are certain advantages of LiDAR (Light Detection and Ranging) over radar and vision-based sensors. It sends out thousands of fast-moving laser light waves, and when those waves are reflected, they provide a far more precise impression of the size, distance, and other characteristics of a vehicle. Numerous pulses produce unique point clouds, which are collections of points in three dimensions; hence, a LiDAR sensor may also provide a three-dimensional image of an object.
LiDAR sensors frequently have excellent precision when detecting small objects, which enhances object identification accuracy. Furthermore, LiDAR sensors can be set up to provide a 360° view of the surroundings of the car, negating the need for several identical sensors.
The disadvantage is that LiDAR sensors have a complicated architecture and design, which means that adding one to a car can result in a multiplication of manufacturing costs. Furthermore, the high processing power requirements of these sensors make it challenging to combine them into a small design. The majority of LiDAR sensors operate at 905 nm, which allows for precise data collection in a limited field of view up to 200 m.
A few businesses are also developing 1550 nm LiDAR sensors, which will be even more accurate over a greater distance.
3. Ultrasonic Sensors
The majority of uses for ultrasonic sensors in autonomous vehicles occur in low-speed driving scenarios. Ultrasonic sensors are found in the majority of parking assist systems because they can accurately measure the distance between an object and a car, regardless of the object’s size or shape.
The transmitter-receiver configuration makes up the ultrasonic sensor. The ultrasonic sound waves are sent by the transmitter, and the distance to the obstacle is computed from the time interval between the wave’s transmission and reception.
Ultrasonic sensors have a precise distance measurement range of a few millimeters to five meters. Additionally, they can detect objects at very close range from the car, which can be quite useful when parking. Additionally, ultrasonic sensors can be utilized to identify environmental factors and facilitate vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication. Sensor data from thousands of these networked cars provides reference data for various situations, conditions, and places, and can aid in the development of algorithms for autonomous vehicles.
4. Filtering Out Noise
Unwanted noise or interference in the surroundings is the primary source of uncertainty created by the use of individual sensors. Naturally, every piece of data that is detected by a sensor in the environment is made up of two parts: the noise, which we want to ignore, and the signal, which we require.
However, the uncertainty comes from not knowing how much noise there is in any given set of data. Generally speaking, high-frequency noise can lead to significant distortions in sensor data. Such high-frequency noise must be eliminated if we are to have the most precise signal possible. Linear (like the simple moving average) and non-linear (like the median) filters are the two categories of noise filters.

The noise filters that are most often utilized include:
A low-pass filter attenuates signals that are greater than the cut-off frequency while passing signals that have frequencies lower than the cut-off.
A high-pass filter attenuates signals that are lower than the cut-off frequency while passing signals that are higher than that cut-off frequency.
The Kalman filter, recursive least squares (RLS), and least mean square error (LMS) are a few other popular filters.
Development of Autonomous Vehicle Features at Dorle Controls
Our goal at Dorle Controls is to offer customized software development and integration services for self-driving cars as well. This covers both creating specific applications depending on user needs and creating the full software stack for an autonomous car.
To learn more about our skills in this field, send an email to [email protected].
#VCUs#VehicleControlUnit#sensors#LiDarsensors#Radarsensors#Autonomousvehicle#VCUSupplier#VCUManufacturer#Dorleco
0 notes
Text
#AutomotiveImagingRadar#SensorTechnology#AdvancedDriverAssistanceSystems#AutonomousVehicles#AutomotiveSafety#RadarSensors#AutomotiveTechnology#VehicleSensing#AutomotiveElectronics#TransportationIndustry#AutomotiveInnovation#FutureOfMobility#AutomotiveMarketAnalysis#SemiconductorIndustry#MarketForecast
0 notes
Text
Radar Sensors Are Taking Over! Market Set to Hit $74.3B by 2034!
Radar Sensor Market is transforming industries with precise detection and measurement solutions, driving autonomous vehicles, industrial automation, and aerospace advancements. As demand for enhanced safety, efficiency, and automation surges, radar sensor innovations are shaping the future of smart technology.
To Request Sample Report : https://www.globalinsightservices.com/request-sample/?id=GIS33023 &utm_source=SnehaPatil&utm_medium=Article
📈 Market Insights & Growth Trends
✅ Automotive radar sensors lead with applications in adaptive cruise control and collision avoidance, driven by autonomous vehicle adoption. ✅ Industrial automation ranks second (30%), fueled by Industry 4.0 and smart manufacturing. ✅ Consumer electronics (15%) and aerospace & defense (10%) contribute to sector diversity. ✅ North America dominates, backed by autonomous vehicle R&D and strong investments. ✅ Europe follows, with regulatory support boosting automotive radar applications. ✅ Asia-Pacific is a rising powerhouse, with rapid urbanization and smart city adoption.
🏆 Market Segmentation
🔹 Type: Imaging Radar, Non-Imaging Radar, CW Radar, Pulsed Radar 🔹 Technology: FMCW, Ultra-Wideband, Millimeter Wave 🔹 Application: Automotive, Aerospace & Defense, Industrial, Security, Traffic Management 🔹 Key Players: Robert Bosch GmbH, Continental AG, Infineon Technologies AG
🚀 Future Outlook
The radar sensor market is set for exponential growth with IoT, 5G integration, and smart infrastructure innovations. Challenges like high costs and regulatory compliance persist, but breakthroughs in AI-driven radar systems and advanced sensor capabilities will unlock new market potential.
#radarsensors #autonomousvehicles #smarttechnology #radardetection #industrialautomation #aerospacetech #automotiveradar #collisionavoidance #selfdrivingcars #millimeterwave #fmcwradar #smartmanufacturing #trafficmanagement #surveillance #aiintech #5gconnectivity #iotdevices #nextgentech #radarsolutions #radarapplications #securitysolutions #objectdetection #radartech #advancedanalytics #vehicletechnology #defensetech #radarforautonomy #automotivesafety #radarintegration #futuretech #sensorsolutions #smartcities #innovationintech #radarfuture #industry40
Research Scope:
· Estimates and forecast the overall market size for the total market, across type, application, and region
· Detailed information and key takeaways on qualitative and quantitative trends, dynamics, business framework, competitive landscape, and company profiling
· Identify factors influencing market growth and challenges, opportunities, drivers, and restraints
· Identify factors that could limit company participation in identified international markets to help properly calibrate market share expectations and growth rates
· Trace and evaluate key development strategies like acquisitions, product launches, mergers, collaborations, business expansions, agreements, partnerships, and R&D activities
About Us:
Global Insight Services (GIS) is a leading multi-industry market research firm headquartered in Delaware, US. We are committed to providing our clients with highest quality data, analysis, and tools to meet all their market research needs. With GIS, you can be assured of the quality of the deliverables, robust & transparent research methodology, and superior service.
Contact Us:
Global Insight Services LLC 16192, Coastal Highway, Lewes DE 19958 E-mail: [email protected] Phone: +1–833–761–1700 Website: https://www.globalinsightservices.com/
0 notes
Text
Millimeter Wave Radar Market is EXPLODING! From $1.9B to $7.6B by 2034! 📡🔥
Millimeter wave (mmWave) radar market is expanding rapidly, driven by the increasing adoption of advanced sensing technologies across various industries. This technology, which operates in the 30 GHz to 300 GHz frequency range, offers high precision, superior resolution, and enhanced object detection capabilities, making it essential for applications in automotive, aerospace, defense, telecommunications, and healthcare.
To Request Sample Report : https://www.globalinsightservices.com/request-sample/?id=GIS22015 &utm_source=SnehaPatil&utm_medium=Article
A significant driver of market growth is the rising demand for autonomous vehicles and advanced driver-assistance systems (ADAS). mmWave radar enhances vehicle safety by providing real-time object detection, collision avoidance, and adaptive cruise control. Additionally, the expansion of 5G networks is fueling demand for mmWave technology in high-speed data transmission and connectivity solutions.
The defense and security sectors are also leveraging millimeter wave radar for surveillance, target detection, and threat monitoring. Meanwhile, industries like healthcare are integrating this technology into non-contact vital sign monitoring systems, improving remote patient care.
North America leads the market due to strong investments in automotive automation, 5G infrastructure, and military applications. However, Asia-Pacific is emerging as a key growth region, with increasing adoption in smart transportation, consumer electronics, and telecommunications.
Despite its advantages, challenges such as high production costs, signal interference, and regulatory complexities remain. However, ongoing R&D and miniaturization efforts are expected to drive down costs and enhance adoption.
With advancements in autonomous systems, smart cities, and next-gen communication networks, the millimeter wave radar market is poised for substantial growth in the coming years.
#millimeterwaveradar #mmwaveradar #radartechnology #autonomousvehicles #adas #5gtechnology #smartcities #automotiveinnovation #radarsensors #futureoftransportation #collisionavoidance #radarengineering #wirelesscommunications #defensetechnology #militaryradar #aerospaceengineering #nextgenradar #mmwavesensors #iotconnectivity #radarsolutions #highfrequencytech #radardetection #remotehealthcare #securitysurveillance #droneintegration #wirelesstechnology #radarapplications #autonomousdriving #futuremobility #radarresearch #millimeterwave #smartmobility #radarinfrastructure #precisionradar #radarnetworks #aiinsensing #vehicleradar #mmwave5g #industrialautomation #surveillanceinnovation #radarsystems
0 notes
Text

Contact-free, Radar technology discharge measurement (RQ 30) for rivers, streams, open channels, and canals where continuous monitoring is desired.
Water quality monitoring solutions from SOMMER Messtechnik come with an equipped & latest technology, combined with the best suited #installation & #services from Aaxis Nano Technologies Pvt. Ltd.
Additionally, the equipment is not susceptible to contamination, debris, or #driftwood in the #water & warrants #low_maintenance and fail-safe operation, especially during #highwater or #flooding.
Know more about the range: aaxisnano.com/sommer 𝐆𝐞𝐭 𝐐𝐮𝐨𝐭𝐞s: [email protected]
#aaxisnano#sommer#rq30#radarsensor#radarsystems#floodmanagement#watermanagement#watersolution#maintenance#technology#rivermonitoring#canals#streams#environmentalmanagement#watermonitoring#continousmonitoring#noida
0 notes
Photo

#MasterClassSeries2021 LIVE Web Session Alert Register Here: https://lnkd.in/gh8w44D LIVE Webinar: Automotive Safety: Modeling Sensors for ADAS Simulation Register Here: https://lnkd.in/gh8w44D Date: 27th July 2021 | Time: 4:00 PM IST
0 notes
Photo

Радарный датчик мертвой зоны. Задний. Новый. Blind Spot Assist Radar Sensor Unit. Ассистент слепых зон Мерседес. Радарный датчик системы Distronic. Задний левый. Задний правый. RADARSENSOR OEM parts number Mercedes-Benz: A0009054111 A 000 905 41 11 A000 905 41 11 0009054111 000 905 41 11 Применимость радарного датчика в моделях Мерседес: Mercedes-Benz CLA-class C118 / W118 Mercedes-Benz GL-class, GLE-class W167 Mercedes-Benz A-class W177 Mercedes S-class Coupe C217 / W217 Mercedes-Benz S-class W222 Mercedes E-class Coupe C238 / W238 Мерседес Бенц GLC-class W253 Mercedes-Benz CLS-класс C257 / W257 https://merc.by/uslugi/zapchasti-mersedes/elektrooborudovanie/datchik-a0009054111.html 🌐merc.by 📞+375299898999 📨+375292895999 viber, what's app #mercedesservice #mercedesвминске #mercedesparts #мерседес #мерседесвминске #мерседесминск #ремонтмерседесвминске (at mercby) https://www.instagram.com/p/B89aJsDhJgU/?igshid=qm52pktyo937
#mercedesservice#mercedesвминске#mercedesparts#мерседес#мерседесвминске#мерседесминск#ремонтмерседесвминске
1 note
·
View note
Video
instagram
Glint Germicidal🦠UV Lights💡Aluminum Body, Microwave Sensor, Timer⏱Function, Child Lock🔒, Advanced Safety Features, Long Life UV Lamp @lightingsouq #lightingsouq #lightingsouqproduct #germicidallight #germicidaluv #germicidallamps #uvlight #uvlightsinqatar #radarsensor #microwavesensor #glintgermicidallights https://www.instagram.com/p/CAf60UUAuh_/?igshid=nh68hrtflck7
#lightingsouq#lightingsouqproduct#germicidallight#germicidaluv#germicidallamps#uvlight#uvlightsinqatar#radarsensor#microwavesensor#glintgermicidallights
0 notes
Text
America first
Door Handles: Brose Coburg, Germany Brake management: Bosch, Germany Steering Gear: "Robert Bosch Automotive Steering" (formerly ZF steering systems), Germany Operating software: Elektrobit Erlangen, Germany Radar sensor: Bosch, Germany Steering column with all controls: Daimler, Germany Suspension / air suspension system: Conti, Germany Stereo: Bose, Germany Brakes: Brembo, Italy Camera for autopilot: Mobile Eye, Israel Seats: Recaro, Germany Make-up mirror: Magna Spiegel, Germany Rear view mirror inside: Gentex, Germany Design: Jaguar, United Kingdom
Name: TESLA
Türgriffe: Brose Coburg, Germany Bremsmanagement: Bosch, Germany Lenkgetriebe: „Robert Bosch Automotive Steering“ (früher ZF-Lenksysteme), Germany Bediensoftware: Elektrobit Erlangen, Germany Radarsensor: Bosch, Germany Lenksäule mit allen Bedienelementen: Daimler, Germany Fahrwerk/Luftfedersystem: Conti, Germany Stereoanlage: Bose, Germany Bremsen: Brembo, Italy Kamera für Autopilot: Mobile Eye, Israel Sitze: Recaro, Germany Kosmetikspiegel: Magna Spiegel, Germany Rückspiegel innen: Gentex, Germany Design: Jaguar, United Kingdom
9 notes
·
View notes
Text
Unternehmen, die im Vogelerkennungssystem behoben-Geschäft tätig sind, planen Schritte, um ihren Marktanteil zu erhöhen, indem sie ihre USP-Aussagen hervorheben, attraktive Produktverpackungen entwerfen, ein vielfältiges Produktportfolio anbieten und Produkte auf Online-Plattformen präsentieren, um nur einige der wichtigsten Erfolgsstrategien zu nennen. Der Bericht bietet detaillierte Profile der Top-Unternehmen, die die Vogelerkennungssystem behoben Markt-Wertschöpfungskette bedienen, zusammen mit ihren Strategien für den kurz-, mittel- und langfristigen Zeitraum.
0 notes
Text
AI & Self-Driving Cars: A $25.8B Industry by 2034 – The Future is Now!
AI in Autonomous Vehicle Sensors Market is accelerating towards a smarter, safer future, integrating AI-driven LiDAR, radar, and camera systems to enhance vehicle perception and decision-making. These cutting-edge sensors enable autonomous vehicles to navigate complex environments, ensuring efficiency and safety while reducing accidents and optimizing traffic flow. 🚦
To Request Sample Report : https://www.globalinsightservices.com/request-sample/?id=GIS33019 &utm_source=SnehaPatil&utm_medium=Article
🔍 Market Overview LiDAR leads the market, offering unmatched accuracy in environmental mapping and obstacle detection. Camera sensors follow closely, benefiting from advancements in AI-driven image processing. Radar sensors, while slightly behind, are gaining traction due to their reliability in adverse weather conditions.
🌎 Regional Insights
North America dominates, driven by massive investments and technological innovation in autonomous vehicle development.
Europe ranks second, benefiting from stringent safety regulations and a strong automotive industry.
Key players: The United States and Germany spearhead advancements, fostering strategic partnerships to enhance sensor accuracy and AI integration.
📊 Market Segmentation & Key Trends
Type: LiDAR, Radar, Ultrasonic, Camera, Infrared Sensors
Application: Passenger Vehicles, Commercial Vehicles, Ride-Sharing, Logistics
Technology: Machine Learning, Deep Learning, Computer Vision, Sensor Fusion
Functionality: Perception, Localization, Mapping, Decision-Making
Deployment: Cloud-Based, Edge-Based, Hybrid
🚀 Future Outlook The LiDAR segment dominates, while camera-based sensors hold 30% of the market, followed by radar sensors at 25%. Major players like Velodyne Lidar & Luminar Technologies are driving innovation, while regulatory frameworks in the US & EU shape safety standards. 🚘 Despite high production costs, increased R&D investments and AI integration will fuel growth, making autonomous driving a reality!
#autonomousvehicles #aiinsensors #lidartechnology #radarsensors #camerasensors #sensorfusion #driverlesscars #futureofmobility #smarttransportation #aiinmobility #deeptech #machinelearning #computervision #automotiveinnovation #robotaxis #selfdrivingcars #nextgentech #avtechnology #smartcities #connectedcars #automateddriving #aiintheautomotiveindustry #techforgood #vehicletechnology #innovationdriven #ridesharing #logisticsautomation #autonomousfleets #smartmobilitysolutions #evfuture #mobilitydisruption #automotivesensors #mappingtechnology #cloudcomputing #aiinlogistics #edgecomputing
Research Scope:
· Estimates and forecast the overall market size for the total market, across type, application, and region
· Detailed information and key takeaways on qualitative and quantitative trends, dynamics, business framework, competitive landscape, and company profiling
· Identify factors influencing market growth and challenges, opportunities, drivers, and restraints
· Identify factors that could limit company participation in identified international markets to help properly calibrate market share expectations and growth rates
· Trace and evaluate key development strategies like acquisitions, product launches, mergers, collaborations, business expansions, agreements, partnerships, and R&D activities
About Us:
Global Insight Services (GIS) is a leading multi-industry market research firm headquartered in Delaware, US. We are committed to providing our clients with highest quality data, analysis, and tools to meet all their market research needs. With GIS, you can be assured of the quality of the deliverables, robust & transparent research methodology, and superior service.
Contact Us:
Global Insight Services LLC 16192, Coastal Highway, Lewes DE 19958 E-mail: [email protected] Phone: +1–833–761–1700 Website: https://www.globalinsightservices.com/
0 notes
Text
Unternehmen, die im Vogelerkennungssystem behoben-Geschäft tätig sind, planen Schritte, um ihren Marktanteil zu erhöhen, indem sie ihre USP-Aussagen hervorheben, attraktive Produktverpackungen entwerfen, ein vielfältiges Produktportfolio anbieten und Produkte auf Online-Plattformen präsentieren, um nur einige der wichtigsten Erfolgsstrategien zu nennen.
0 notes
Text
My #German #Auto is being sassy and demanding. Told me my #RadarSensors are dirty. A technical way of saying my car needs to go to #CarWash.
#Mercedes #BClass

0 notes
Text
110 000 rygge- og parkeringsskader årlig: Her er neste generasjons teknologi for problemfri parkering!
https://www.y6.no/110-000-rygge-og-parkeringsskader-arlig-her-er-neste-generasjons-teknologi-for-problemfri-parkering/
110 000 rygge- og parkeringsskader årlig: Her er neste generasjons teknologi for problemfri parkering!

Dato: 03-11-2016 15:48 CET Opprinnelig tittel på pressemeldingen: 110 000 rygge- og parkeringsskader årlig: Her er neste generasjons teknologi for problemfri parkering! Kategori: , førerassistansesystemer blindsonevarsling antikollisjonsassistent med fotgjengeroppdagelse frontkamera med 180 graders visning blendingsfrie frontlyket parkeringsassistent Trafikkskiltgjenkjenning
– Parkering er fremdeles blant det mest utfordrende en sjåfør gjør i det daglige, men det har heldigvis kommet mye ny teknologi som gjør bilkjøringen mindre stressende. Nå investerer Ford tungt i teknologi som skal gi våre kunder enda bedre førerassistansesystemer som er både en fordel for sjåfører, passasjerer, fotgjengere og syklister, sier Per Gunnar Berg, adm. dir. i Ford Motor Norge.
I følge tall fra Finans Norges trafikkskadestatistikk skjedde det i gjennomsnitt 300 skader med privatbiler i forbindelse med rygging eller påkjørsel av parkert bil hver eneste dag i 2015.
Det betyr også at hver tredje innleverte bilskademelding til forsikringsselskapene skyldes en av disse ulykkesartene. Samlet sett kostet disse ulykken i Norge hele 951 millioner kroner.
Ledende på førerassistansesystemer
Nå jobber Ford med helt nye systemer som skal hjelpe deg å unngå skader i forbindelse med parkering. Ford er allerede ledende på førerassistansesystemer og mye av den nye teknologien bygger på funksjoner som allerede er tilgjengelig i Fords modeller. Både et system som advarer deg mot kryssende trafikk bak bilen når du er i ferd med å rygge ut og et vidvinkelkamera som overvåker området bak bilen og ut til siden finnes allerede i Focus, C-MAX, Kuga, Mondeo, S-MAX, Galaxy og Edge.
For bilder, video og mer informasjon: KLIKK HER
Ny og forbedret parkeringsassistent
Også Fords geniale parkeringsassistent – som hjelper deg både når du skal lukeparkere eller når du skal vinkelrett inn i en parkeringslomme for eksempel i et parkeringshus – skal bli enda bedre. På dagens Ford-modeller tar bilen over styringen, mens sjåføren kontrollerer gass og brems, vil systemet parkerer for deg om du skulle ønske det.
Den nye og forbedrede parkeringsassistenten kontrollerer både styring, gass og brems simpelthen ved å trykke på en knapp. Systemet bruker også sensorer for å finne parkeringsplasser som passer bilen.
Systemet som skal hjelpe deg med kryssende trafikk bak bilen når du rygger ut av en parkeringslomme benytter radarsensorer for å overvåke områdene bak bilen. Reagerer ikke sjåføren på advarsler er systemet lagd slik at det automatisk bremser bilen dersom det oppstår en fare. Systemet fanger også opp motorsykler og sykler med hastigheter som potensielt kan utgjøre en trussel ved ryggingen.
Allerede i dag kan Ford by på et slikt system, men da uten den automatiske nedbremsingen
Det jobbes også med å få på plass et system som hjelper deg å styre rundt andre saktegående eller stillestående biler når du selv kjører i høy hastighet for eksempel på en motorvei.
Vil hindre kjøring i feil kjørebane
Et annet system som nå utvikles ved Fords europeiske senter for forskning og utvikling i Aachen i Tyskland skal forhindre at sjåfører skal kjøre i feil kjørebane på motorveien.
Dette skjer ved å benytte seg av skiltgjenkjenningssystemet, som allerede er tilgjengelig på Fords modeller, og bilens navigasjonssystem. Bilen fanger opp skiltene som advarer at du kjører i feil kjøreretning og gir sjåføren både en visuell og en hørbar advarsel dersom bilen kjører mot kjøreretningen.
Ford har bestemt seg for å tredoble sin satsing på førerassistansesystemer og håper å ha alle disse nyhetene på plass i løpet av de neste to årene.
De nye vidvinkelkameraene som overvåker områdene bak bilen er en videreutvikling av de frontmonterte vidvinkelkameraene som er tilgjengelig både på nye Ford Edge, nye Ford S-MAX og Galaxy. Flere av de andre systemene er også videreutviklinger av allerede avanserte kjøreassistansesystemer som er tilgjengelig på flere av dagens nye Ford-modeller.
Ledende på kjøreassistanse
Fra før er Ford allerede ledende på å gjøre kjøreassistentsystemer tilgjengelig for folk flest. I løpet av de siste årene har en rekke nye teknologier blitt gjort tilgjengelig for massemarkedet:
Intelligent hastighetsbegrenser som overvåker fartsgrenseskiltene og tilpasser bilens hastighet til gjeldende fartsgrense. Dermed kan sjåføren slappe mer av bak rattet med redusert risiko for fartsovertredelser.
Antikollisjonsassistent med fotgjengeroppdagelse, som i beste fall vil kunne hindre påkjørsel av fotgjengere, eller redusere alvorlighetsgraden av et eventuelt sammenstøt.
Blendingsfrie frontlykter med adaptive LED-lys som oppdager møtende trafikk og reduserer lys som kan blende samtidig som andre deler av veien gis optimal belysning.
Frontkamera med 180-graders visning forbedrer sjåførens sikt når det kjøres ut av en parkeringsplass eller inn i et kryss, og bildet vises på en 8-tommers skjerm i midtkonsollen
Varsling av kryssende trafikk advarer sjåføren dersom det er fare for at en bil skal krysse bak egen bil ved utkjøring fra en parkeringsplass.
Parkeringsassistenten kan oppdage en ledig plass og rygge bilen inn ved siden av en annen bil – eller foreta en lukeparkering uten at sjåføren behøver å røre rattet.
Ytterligere førerassistanseteknologier inkluderer blant annet blindsoneinformasjonssystem, trafikkskiltgjenkjenning, filskiftevarsling, filskifteassistanse, adaptiv cruisekontroll og føreroppmerksomhetsovervåkning
Ford kommer også med automatisk ekstremværlys.
Ford ble ifjor kåret til det mest innovative volummerket i verden.
Kilde: Pressekontor Ford Motor Norge AS – PRESSEMELDING –
————
Om Ford Motor Company
Ford Motor Company er en global bilindustrileder basert i Dearborn, Michigan, USA, som produserer eller distribuerer biler på over seks kontinenter. Med ca. 166.000 ansatte og 70 fabrikker på verdensbasis inkluderer konsernet bilmerkene Ford og Lincoln. Konsernet leverer finansielle tjenester gjennom Ford Motor Credit Company. For mer informasjon vedrørende Fords produkter, vennligst besøk www.ford.no
Ford Europa er ansvarlig for å produsere, selge og vedlikeholde Ford-merkede kjøretøyer i 51 individuelle markeder og har ca. 66.000 ansatte. I tillegg til Ford Motor Credit Company inkluderer Ford Europas virksomheter Ford Customer Service Division og 22 produksjonsenheter, inklusive samarbeidsprosjekter. Den første Ford-bilen ble sendt til Europa i 1903 – samme år som Ford Motor Company ble etablert. Produksjon i Europa startet i 1911.
Hashtags: # #førerassistansesystemer blindsonevarsling antikollisjonsassistent med fotgjengeroppdagelse frontkamera med 180 graders visning blendingsfrie frontlyket parkeringsassistent Trafikkskiltgjenkjenning førerassistansesystemer blindsonevarsling antikollisjonsassistent med fotgjengeroppdagelse frontkamera med 180 graders visning blendingsfrie frontlyket parkeringsassistent Trafikkskiltgjenkjenning
#Ford Motor Norge AS#førerassistansesystemer blindsonevarsling antikollisjonsassistent med fotgjengeroppdagelse frontkamera med 180 graders visning blendingsfrie#Pressemeldinger
0 notes
Text
Störung der Autoradarsicherheit
Das wenig bekannte Thema Radarsicherheit wird zur potenziellen Achillesferse für Fahrerassistenz- und hochautomatisierte Fahrzeuge: Radarsignale stören sich gegenseitig im wlan frequenz stören.
Radar ist zu einer wichtigen Erfassungsmethode geworden, die bildgebende Kameras ergänzt. Das Radar funktioniert bei allen Wetterbedingungen und unterstützt eine Reihe autonomer Fahrfunktionen, einschließlich automatischer Notbremsung (AEB). Aber wenn die Radare wie die Teilchenbeschleuniger von Ghostbusters durch die Ströme des anderen hindurchgehen, werden sie frustriert oder versagen.
Obwohl dies kein Phänomen ist, das Autohersteller öffentlich gewarnt haben oder Autofahrer im Allgemeinen glauben, werden Autoradare, die in überfüllten Umgebungen betrieben werden, starken Störungen ausgesetzt.
Radaranwendungen reichen von adaptiver Geschwindigkeitsregelung und Toter-Winkel-Erkennung bis hin zu Frontkollisionswarnsystemen und intelligenter Einparkhilfe. Damit das Fahrzeug einen 360-Grad-Rundumblick erhält, benötigt es Nah- und Fernbereichsradarchips. Normalerweise wird Radar (All Weather) verwendet, und manchmal werden Lidar und Kameras verwendet, um drohende Kollisionen zu erkennen.
NXP Semiconductors prognostiziert, dass die Durchdringungsrate von Automobilradaren bis 2030 auf 55 % ansteigen wird. Radarstörungen seien unvermeidlich, sagte er: Wenn mehrere Radare gleichzeitig auf den gleichen oder überlappenden Frequenzen senden, wenn sie einen gemeinsamen sichtbaren Pfad teilen. Wenn Sie versuchen, die Straßenbedingungen in Echtzeit zu erfassen, ist es einfach, Übertragungen von mehreren Fahrzeugen zu sehen. Da wir alle das gleiche Frequenzband verwenden, kann sich dies mit zunehmender Montagerate verschlechtern. Der Einfluss einiger frequenz störsender"
Radarstörungen sind kaum eine zufällige Folge der Radarverbreitung. Die Automobilindustrie ist gewarnt. Vor mehr als zehn Jahren gründete Europa ein Projekt namens MOSARIM (More Safety for All through Radar Interference Mitigation) und veröffentlichte 2012 einen Bericht. Das Projekt untersuchte „die Definition und Ausarbeitung gegenseitiger Radarinterferenzen zwischen Fahrzeugen sowie wirksame Gegenmaßnahmen und Abschwächungstechniken. " " …Systeme, die in Umgebungen mit wenigen anderen Radargeräten eine gute Leistung erbringen, können in überfüllten Umgebungen mit Radargeräten erhebliche Leistungseinbußen erleiden. Die Forschungsergebnisse zeigen, dass der Interferenzpegel basierend auf dem aktuellen System, das in einer überfüllten Umgebung arbeitet, erheblich sein wird. Bei vielen Fahrzeugen, die Radare im 76-81-GHz-Band betreiben, kann die Leistung anderer Radare die für die angegebene Leistung erforderliche Zielecholeistung um mehrere Größenordnungen überschreiten.
Ein heute übliches Verfahren besteht darin, "Interferenzen zu begrenzen, indem das übertragene Signal zeitlich oder frequenzmäßig randomisiert wird". Herr Gu gab zu, dass diese Art der Randomisierung unlogisch ist. Er sagte: „Heute tun Sie das blind. Das ist natürlich sehr gut, vor allem wenn nicht so viele Autos mit Radar unterwegs sind. Aber wenn man die Interferenz des Radarsensors verbessern will, um Robustheit zu erreichen, ist es notwendig, eine Zusammenarbeit zwischen Radarsensoren zu suchen, aber den Einfluss von militärischer Störsender."
Verschiedene Hersteller verwenden unterschiedliche Parametereinstellungen für die Wellenform, um ihre Produktansprüche zu differenzieren und unterschiedliche Anwendungsanforderungen abzudecken, wie z. B. Trägerfrequenz, Bandbreite, Chirp-Dauer, Abtastzeit, Dauer des Erfassungszeitraums und Änderung von Parametern innerhalb des Erfassungszeitraums Auf unterschiedliche Weise.
All dies sollte niemanden in der Radar-Community überraschen. "Es gibt lehrbuchartige Signalverarbeitungsalgorithmen auf dem Markt, und sie werden von der Industrie verwendet", sagte Gu. Lehrbuchalgorithmen haben jedoch Grenzen, betonte er. „Sie beschränken sich normalerweise darauf, mit Störungen mit geringer Korrelation umzugehen. Und sie können nur mit sehr begrenzten Störungen umgehen – eine oder zwei gleichzeitig. Die Auswirkungen von tragbare Signal störer.“
In der Verkehrssituation auf einer zweispurigen Autobahn wird unter der Annahme, dass das Radar eine zufällig ausgewählte Trägerfrequenz verwendet, vorhergesagt, dass "Automobilradare auf Leistung von anderen Radargeräten treffen, deren Leistung viel größer ist als die Echos ihrer eigenen Übertragung, die erforderlich sind, um andere Fahrzeuge verfolgen. Interferenz. Sie beträgt fast vier Größenordnungen oder fast 40 dB, was größer ist als das typische Echo des vom System angegebenen Referenzziels."
Bei nach hinten gerichteten Radaren (wie Systemen zur Erkennung des toten Winkels) „sind diese Einheiten anfällig für das direkte Eintreffen von Radaren zur Vermeidung von Vorwärtskollisionen, die eine höhere Leistung und einen höheren Antennengewinn verwenden“. In der Studie heißt es: "Unsere Analyse zeigt, dass diese Geräte möglicherweise Die vom Frontkollisions-Radar empfangene Störleistung ist fast fünf Größenordnungen höher als die Reflexion des festgelegten Referenzziels, dh 50 dB." Bisher ist der Einfluss von Radar oder gps störgerät in der realen Welt jedoch nicht auf der Straße zu spüren.
"Radar-zu-Radar-Interferenzen sind noch unbekannt, und als Anwendungsforscher, die Radar fast täglich verwenden, können wir nicht sagen, dass wir Radar-zu-Radar-Interferenzen erlebt haben
https://www.jammer-welt.com/tattoo-lost-wilde-verschworung-von-john-mcafee-nach-dem-tod-des-tech-gurus-in-einer-spanischen-gefangniszelle-aus.html
https://www.jammer-welt.com/intrepid-tiger-ii-startet-erstflug-auf-mv-22B-osprey.html
0 notes