#50688
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
BuzzFeed published a report claiming that Tumblr was utilized as a distribution channel for Russian agents to influence American voting habits during the 2016 presidential election in Feb 2018.
Quote
そう言われてみると、イマドキな淡麗系のラーメンとかで、水菜や白髪ネギと一緒に唐突に糸唐辛子が乗るパターンってありますね。そういう店、盛り付けだけでなく器や内装なども含めて、「かつておしゃれだった創作和食」からの文化継承ってあるような気がします。作務衣とか。
Xユーザーのイナダシュンスケさん
13 notes
·
View notes
Text
that teenage feeling!
read it on AO3 at https://ift.tt/Z3JMtRo by fredastaire Eddie responds, quietly, "I don't think I'm one of those girls." and Richie has the desire to shake her by the shoulders then - because Eddie always knows what she wants, but for some, inconceivable reason refuses to let herself have it. But Richie knew she’d be a huge fucking hypocrite to say that, as she held herself back from the only thing she’d ever truly wanted, frozen in place like an opposum playing dead, as if loving Eddie would kill her. Maybe it would. (or: Eddie Kaspbrak grows up shaped like a boy and molts into a woman. Richie Tozier is there the whole time.) Words: 50688, Chapters: 1/1, Language: English Fandoms: IT (Movies - Muschietti) Rating: Mature Warnings: No Archive Warnings Apply Categories: F/F Characters: Eddie Kaspbrak, Richie Tozier, Beverly Marsh Relationships: Eddie Kaspbrak/Richie Tozier Additional Tags: ft. cameos from the rest of the losers!, Growing Up Together, Coming of Age, During the 27 Years (IT), Unreliable Narrator Richie Tozier, Losers Club-Typical Codependency, Trans Female Eddie Kaspbrak, being queer in the 90s in new yawk city baby!, i think this is probably a slow burn, That Clown Fucked Them Up Real Good, assholes in love, Miscommunication, Temporary Character Death, Derry-Typical Amnesia read it on AO3 at https://ift.tt/Z3JMtRo
2 notes
·
View notes
Text
Word Count 11-25-23
2288 Words.
Count for the month 50688
1 note
·
View note
Text
LAPD Officer Sergio A. Moreno
https://copblaster.com/blast/50688/lapd-officer-sergio-a-moreno?utm_source=dlvr.it&utm_medium=tumblr
0 notes
Text
Full or Associate Professorship in Molecular Biology of Plants University of Zurich, Faculty of Science The Faculty of Science at the University of Zurich invites applications for the Full or Associate Professorship in Molecular Biology of Plants See the full job description on jobRxiv: https://jobrxiv.org/job/university-of-zurich-faculty-of-science-27778-full-or-associate-professorship-in-molecular-biology-of-plants/?feed_id=50688 #ScienceJobs #hiring #research Zurich #Switzerland #FacultyMember
0 notes
Photo

19659001 DISCLAIMER: The ideas and viewpoints revealed in this video are mine and mine alone. They ought to not be thought about the viewpoints of any medical coding association. You are not needed to click any of the links listed below as they are affiliate links and i might get a little commission if you…
0 notes
Text
I don't think memorizing a dozen prefixes is an improvement over working with decimal points and trailing zeros (i.e., there's no real difficulty in working thousands or thousandths of meters instead of kilometers)
while it looks pretty in a base ten writing system, ten isn't actually a particularly convenient number for doing math. numbers with more prime factors, like 12 (inches in a foot) or 128 (fluid ounces in a gallon) are more easily divided.*
there's a common notion that "everything in metric is neat multiples of ten, with consistent prefixes". This, for various historic and practical reasons, is false. Time is still measured in 60s, 24s, 7s, and 12s (they tried a 10-day week but it didn't catch on); the kilogram is considered a base unit even though it has a prefix (because they had made the prototype grave already and, rather than make a prototype gram, continued to use the same measure), meaning that every prefix dealing with weight is off by a factor of 1000 from what it should be.
Every system of measure that came before the metric system was based on "this is what has been convenient for people to use in their day-to-day life; we've adjusted them slightly for convenience of conversion, but mostly left them alone". The metric system, on the other hand, is fundamentally based on "the French got a collective boner for the number 10 and wanted to erase all traditions in the late 1700s / early 1800s, and we've all been forced to put up with that since"
*the gallon is evenly divisible by 2, 3, 4, 5, 6, 7, 8, 10, 11, 12, 15, 16, 20, 24, 30, 32, 33, 40, 48, 60, 64, 77, 80, 96, 120, 128, 160, 192, 231, 240, 256, 320, 384, 480, 512, 640, 768, 960, 1024, 1280, 1536, 1920, 2048, 2560, 3072, 3840, 4096, 5120, 6144, 7680, 10240, 12288, 15360, 20480, 30720, and 61440;
the mile is evenly divisible by 1, 2, 3, 4, 5, 6, 8, 9, 10, 11, 12, 15, 16, 18, 20, 22, 24, 25, 30, 32, 33, 36, 40, 44, 45, 48, 50, 55, 60, 64, 66, 72, 75, 80, 88, 90, 96, 99, 100, 110, 120, 125, 128, 132, 144, 150, 160, 165, 176, 180, 192, 198, 200, 220, 225, 240, 250, 256, 264, 275, 288, 300, 320, 330, 352, 360, 375, 384, 396, 400, 440, 450, 480, 495, 500, 512, 528, 550, 576, 600, 625, 640, 660, 704, 720, 750, 768, 792, 800, 825, 880, 900, 960, 990, 1000, 1024, 1056, 1100, 1125, 1152, 1200, 1250, 1280, 1320, 1375, 1408, 1440, 1500, 1536, 1584, 1600, 1650, 1760, 1800, 1875, 1920, 1980, 2000, 2112, 2200, 2250, 2304, 2400, 2475, 2500, 2560, 2640, 2750, 2816, 2880, 3000, 3072, 3168, 3200, 3300, 3520, 3600, 3750, 3840, 3960, 4000, 4125, 4224, 4400, 4500, 4608, 4800, 4950, 5000, 5120, 5280, 5500, 5625, 5632, 5760, 6000, 6336, 6400, 6600, 6875, 7040, 7200, 7500, 7680, 7920, 8000, 8250, 8448, 8800, 9000, 9216, 9600, 9900, 10000, 10560, 11000, 11250, 11264, 11520, 12000, 12375, 12672, 12800, 13200, 13750, 14080, 14400, 15000, 15360, 15840, 16000, 16500, 16896, 17600, 18000, 19200, 19800, 20000, 20625, 21120, 22000, 22500, 23040, 24000, 24750, 25344, 25600, 26400, 27500, 28160, 28800, 30000, 31680, 32000, 33000, 33792, 35200, 36000, 38400, 39600, 40000, 41250, 42240, 44000, 45000, 46080, 48000, 49500, 50688, 52800, 55000, 56320, 57600, 60000, 61875, 63360, 64000, 66000, 70400, 72000, 76800, 79200, 80000, 82500, 84480, 88000, 90000, 96000, 99000, 101376, 105600, 110000, 115200, 120000, 123750, 126720, 128000, 132000, 140800, 144000, 158400, 160000, 165000, 168960, 176000, 180000, 192000, 198000, 211200, 220000, 230400, 240000, 247500, 253440, 264000, 281600, 288000, 316800, 320000, 330000, 352000, 360000, 384000, 396000, 422400, 440000, 480000, 495000, 506880, 528000, 576000, 633600, 640000, 660000, 704000, 720000, 792000, 844800, 880000, 960000, 990000, 1056000, 1152000, 1267200, 1320000, 1408000, 1440000, 1584000, 1760000, 1920000, 1980000, 2112000, 2534400, 2640000, 2880000, 3168000, 3520000, 3960000, 4224000, 5280000, 5760000, 6336000, 7040000, 7920000, 10560000, 12672000, 15840000, 21120000, 31680000, and 63360000.
Being an American scientist is so fucking embarrassing
I'm constantly screaming at my brain telling it to choose whether to think in metric or imperial by default
477 notes
·
View notes
Photo

Pair of Earrings, Brooklyn Museum: Arts of the Americas
Size: a: 1 5/16 x 2 1/4 in. (3.3 x 5.7 cm) b: 1 1/4 x 2 3/16 in. (3.2 x 5.6 cm) Medium: Cotton, beads
https://www.brooklynmuseum.org/opencollection/objects/50688
39 notes
·
View notes
Text
LAPD Officer Sergio A. Moreno
https://copblaster.com/blast/50688/lapd-officer-sergio-a-moreno?utm_source=dlvr.it&utm_medium=tumblr
0 notes
Photo

Impact of COVID-19 ‘heavily felt’ by prisoners globally: UN expert | ; Learn More : http://indiareal.in/?p=50688&lang=en&feed_id=24049&_unique_id=604812a7a730b
0 notes
Text
Optimizing a low-cost camera for machine vision
In this deep dive article, performance optimization specialist Larry Bank (a.k.a The Performance Whisperer) takes a look at the work he did for the Arduino team on the latest version of the Arduino_OV767x library.

Arduino recently announced an update to the Arduino_OV767x camera library that makes it possible to run machine vision using TensorFlow Lite Micro on your Arduino Nano 33 BLE board.
If you just want to try this and run machine learning on Arduino, you can skip to the project tutorial.
The rest of this article is going to look at some of the lower level optimization work that made this all possible. There are higher performance industrial-targeted options like the Arduino Portenta available for machine vision, but the Arduino Nano 33 BLE has sufficient performance with TensorFlow Lite Micro support ready in the Arduino IDE. Combined with an OV767x module makes a low-cost machine vision solution for lower frame-rate applications like the person detection example in TensorFlow Lite Micro.
Need for speed
Recent optimizations done by Google and Arm to the CMSIS-NN library also improved the TensorFlow Lite Micro inference speed by over 16x, and as a consequence bringing down inference time from 19 seconds to just 1.2 seconds on the Arduino Nano 33 BLE boards. By selecting the person_detection example in the Arduino_TensorFlowLite library, you are automatically including CMSIS-NN underneath and benefitting from these optimizations. The only difference you should see is that it runs a lot faster!
The CMSIS-NN library provides optimized neural network kernel implementations for all Arm’s Cortex-M processors, ranging from Cortex-M0 to Cortex-M55. The library utilizes the processor’s capabilities, such as DSP and M-Profile Vector (MVE) extensions, to enable the best possible performance.
The Arduino Nano 33 BLE board is powered by Arm Cortex-M4, which supports DSP extensions. That will enable the optimized kernels to perform multiple operations in one cycle using SIMD (Single Instruction Multiple Data) instructions. Another optimization technique used by the CMSIS-NN library is loop unrolling. These techniques combined will give us the following example where the SIMD instruction, SMLAD (Signed Multiply with Addition), is used together with loop unrolling to perform a matrix multiplication y=a*b, where
a=[1,2]
and
b=[3,5 4,6]
a, b are 8-bit values and y is a 32-bit value. With regular C, the code would look something like this:
for(i=0; i<2; ++i) for(j=0; j<2; ++j) y[i] += a[j] * b[j][i]
However, using loop unrolling and SIMD instructions, the loop will end up looking like this:
a_operand = a[0] | a[1] << 16 // put a[0], a[1] into one variable for(i=0; i<2; ++i) b_operand = b[0][i] | b[1][i] << 16 // vice versa for b y[i] = __SMLAD(a_operand, b_operand, y[i])
This code will save cycles due to
fewer for-loop checks
__SMLAD performs two multiply and accumulate in one cycle
This is a simplified example of how two of the CMSIS-NN optimization techniques are used.
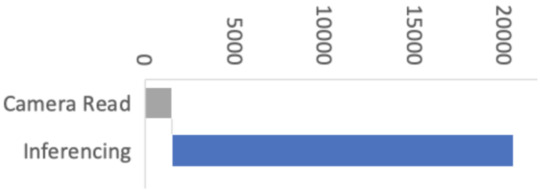
Figure 1: Performance with initial versions of libraries
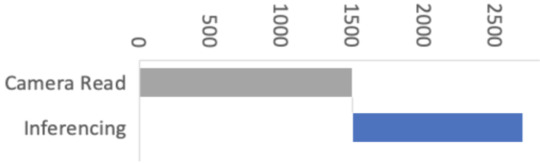
Figure 2: Performance with CMSIS-NN optimizations
This improvement means the image acquisition and preprocessing stages now have a proportionally bigger impact on machine vision performance. So in Arduino our objective was to improve the overall performance of machine vision inferencing on Arduino Nano BLE sense by optimizing the Arduino_OV767X library while maintaining the same library API, usability and stability.

Figure 3: Performance with CMSIS-NN and camera library optimizations
For this, we enlisted the help of Larry Bank who specializes in embedded software optimization. Larry’s work got the camera image read down from 1500ms to just 393ms for a QCIF (176×144 pixel) image. This was a great improvement!
Let’s have a look at how Larry approached the camera library optimization and how some of these techniques can apply to your Arduino code in general.
Performance optimizing Arduino code
It’s rarely practical or necessary to optimize every line of code you write. In fact there are very good reasons to prioritize readable, maintainable code. Being readable and optimized don’t necessarily have to be mutually exclusive. However, embedded systems have constrained resources, and when applications demand more performance, some trade-offs might have to be made. Sometimes it is necessary to restructure algorithms, pay attention to compiler behavior, or even analyze timing of machine code instructions in order to squeeze the most out of a microcontroller. In some cases this can make the code less readable — but the beauty of an Arduino library is that this can be abstracted (hidden) from user sketch code beneath the cleaner library function APIs.
What does “Camera.readFrame” do?
We’ve connected a camera to the Arduino. The Arduino_OV767X library sets up the camera and lets us transfer the raw image data from the camera into the Arduino Nano BLE memory. The smallest resolution setting, QCIF, is 176 x 144 pixels. Each pixel is encoded in 2 bytes. We therefore need to transfer at least 50688 bytes (176 x 144 x 2 ) every time we capture an image with Camera.readFrame. Because the function is performing a byte read operation over 50 thousand times per frame, the way it’s implemented has a big impact on performance. So let’s have a look at how we can most efficiently connect the camera to the Arduino and read a byte of data from it.
Philosophy
I tend to see the world of code through the “lens” of optimization. I’m not advocating for everyone to share my obsession with optimization. However, when it does become necessary, it’s helpful to understand details of the target hardware and CPU. What I often encounter with my clients is that their code implements their algorithm neatly and is very readable, but it’s not necessarily ‘performance friendly’ to the target machine. I assume this is because most people see code from a top-down approach: they think in terms of the abstract math and how to process the data. My history in working with very humble machines and later turning that into a career has flipped that narrative on its head. I see software from the bottom up: I think about how the memory, I/O and CPU registers interact to move and process the data used by the algorithm. It’s often possible to make dramatic improvements to the code execution speed without losing any of its readability. When your readable/maintainable solution still isn’t fast enough, the next phase is what I call ‘uglification.’ This involves writing code that takes advantage of specific features of the CPU and is nearly always more difficult to follow (at least at first glance!).
Optimization methodology
Optimization is an iterative process. I usually work in this order:
Test assumptions in the algorithm (sometimes requires tracing the data)
Make innocuous changes in the logic to better suit the CPU (e.g. change modulus to logical AND)
Flatten the hierarchy or simplify overly nested classes/structures
Test any slow/fast paths (aka statistics of the data — e.g. is 99% of the incoming data 0?)
Go back to the author(s) and challenge their decisions on data precision / storage
Make the code more suitable for the target architecture (e.g. 32 vs 64-bit CPU registers)
If necessary (and permitted by the client) use intrinsics or other CPU-specific features
Go back and test every assumption again
If you would like to investigate this topic further, I’ve written a more detailed presentation on Writing Performant C++ code.
Depending on the size of the project, sometimes it’s hard to know where to start if there are too many moving parts. If a profiler is available, it can help narrow the search for the “hot spots” or functions which are taking the majority of the time to do their work. If no profiler is available, then I’ll usually use a time function like micros() to read the current tick counter to measure execution speed in different parts of the code. Here is an example of measuring absolute execution time on Arduino:
long lTime; lTime = micros(); <do the work> iTime = micros() - lTime; Serial.printf(“Time to execute xxx = %d microseconds\n”, (int)lTime);
I’ve also used a profiler for my optimization work with OpenMV. I modified the embedded C code to run as a MacOS command line app to make use of the excellent XCode Instruments profiler. When doing that, it’s important to understand how differently code executes on a PC versus embedded — this is mostly due to the speed of the CPU compared to the speed of memory.
Pins, GPIO and PORTs
One of the most powerful features of the Arduino platform is that it presents a consistent API to the programmer for accessing hardware and software features that, in reality, can vary greatly across different target architectures. For example, the features found in common on most embedded devices like GPIO pins, I2C, SPI, FLASH, EEPROM, RAM, etc. have many diverse implementations and require very different code to initialize and access them.
Let’s look at the first in our list, GPIO (General Purpose Input/Output pins). On the original Arduino Uno (AVR MCU), the GPIO lines are arranged in groups of 8 bits per “PORT” (it’s an 8-bit CPU after all) and each port has a data direction register (determines if it’s configured for input or output), a read register and a write register. The newer Arduino boards are all built around various Arm Cortex-M microcontrollers. These MCUs have GPIO pins arranged into groups of 32-bits per “PORT” (hmm – it’s a 32-bit CPU, I wonder if that’s the reason). They have a similar set of control mechanisms, but add a twist — they include registers to SET or CLR specific bits without disturbing the other bits of the port (e.g. port->CLR = 1; will clear GPIO bit 0 of that port). From the programmer’s view, Arduino presents a consistent set of functions to access these pins on these diverse platforms (clickable links below to the function definitions on Arduino.cc):
pinMode(pin, mode); digitalRead(pin); digitalWrite(pin, value);
For me, this is the most powerful idea of Arduino. I can build and deploy my code to an AVR, a Cortex-M, ESP8266 or an ESP32 and not have to change a single line of code nor maintain multiple build scripts. In fact, in my daily work (both hobby and professional), I’m constantly testing my code on those 4 platforms. For example, my LCD/OLED display library (OneBitDisplay) can control various monochrome LCD and OLED displays and the same code runs on all Arduino boards and can even be built on Linux.
One downside to having these ‘wrapper’ functions hide the details of the underlying implementation is that performance can suffer. For most projects it’s not an issue, but when you need to get every ounce of speed out of your code, it can make a huge difference.
Camera data capture
One of the biggest challenges of this project was that the original OV7670 library was only able to run at less than 1 frame per second (FPS) when talking to the Nano 33. The reason for the low data rate is that the Nano 33 doesn’t expose any hardware which can directly capture the parallel image data, so it must be done ‘manually’ by testing the sync signals and reading the data bits through GPIO pins (e.g. digitalRead) using software loops. The Arduino pin functions (digitalRead, digitalWrite) actually contain a lot of code which checks that the pin number is valid, uses a lookup table to convert the pin number to the I/O port address and bit value and may even disable interrupts before reading or changing the pin state. If we were to use the digitalRead function for an application like this, it would limit the data capture rate to be too slow to operate the camera. You’ll see this further down when we examine the actual code used to capture the data.
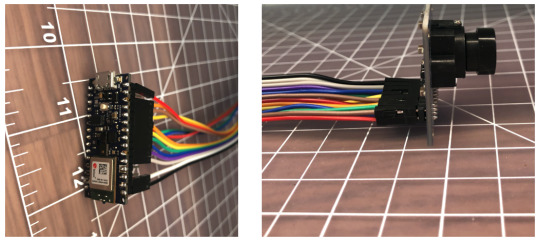
First, a quick review of the OV7670 camera module: According to its datasheet, it’s capable of capturing a VGA (640×480) color image at up to 30 FPS. The kit used for this project has the camera mounted to a small PCB and presents an 8-bit parallel data bus and various sync signals.

It requires an external “master clock” (MCLK in the photo) to drive its internal state machine which is used to generate all of the other timing signals. The Nano 33 can provide this external clock source by using its I2S clock. The OV767X library sets this master clock to 16Mhz (the camera can handle up to 48Mhz) and then there is a set of configuration registers to divide this value to arrive at the desired frame rate. Only a few possible frame rates are available (1, 5, 10, 15, 20, and 30 FPS).

Above is one of the timing diagrams from the OV7670 datasheet. This particular drawing shows the timing of the data for each byte received along each image row. The HREF signal is used to signal the start and end of a row and then each byte is clocked in with the PCLK signal. The original library code read each bit (D0-D7) in a loop and combined them together to form each data byte. The image data comes quickly, so we have very little time to read each byte. Assembling them one bit at a time is not very efficient. You might be thinking that it’s not that hard of a problem to solve on the Nano 33. After all, it has 22 GPIO pins and the Cortex-M inside it has 32-bit wide GPIO ports, so just hook up the data bits sequentially and you’ll be able to read the 8 data bits in one shot, then Mission Accomplished

. If only things were that easy. The Nano 33 does have plenty of GPIO pins, but there isn’t a continuous sequence of 8 bits available using any of the pins! I’m guessing that the original code did it one bit at a time because it didn’t look like there was a better alternative. In the pinout diagram below, please notice the P0.xx and P1.xx numbers. These are the Cortex-M GPIO port 0 and 1-bit numbers (other Cortex-M processors would label them PA and PB).
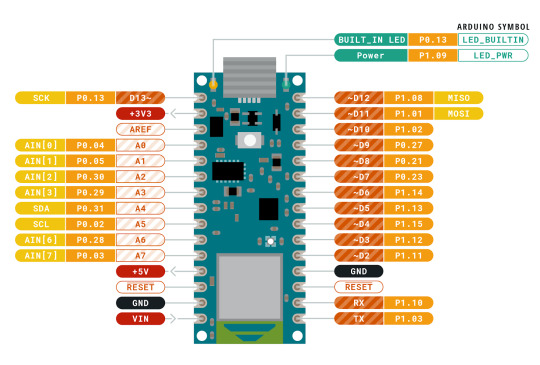
I wasn’t going to let this little bump in the road stop me from making use of bit parallelism. If you look carefully at the bit positions, the best continuous run we can get is 6 bits in a row with P1.10 through P1.15. It’s not possible to read the 8 data bits in one shot…or is it? If we connect D0/D1 of the camera to P1.02/P1.03 and D2-D7 to P1.10-P1.15, we can do a single 32-bit read from port P1 and get all 8 bits in one shot. The bits are in order, but will have a gap between D1 and D2 (P1.04 to P1.09). Luckily the Arm CPU has what’s called a barrel shifter. It also has a smart instruction set which allows data to be shifted ‘for free’ at the same time the instruction is doing something else. Let’s take a look at how and why I changed the code:
Original:
uint8_t in = 0; for (int k = 0; k < 8; k++) { bitWrite(in, k, (*_dataPorts[k] & _dataMasks[k]) != 0); }
Optimized:
uint32_t in = port->IN; // read all bits in parallel in >>= 2; // place bits 0 and 1 at the "bottom" of the register in &= 0x3f03; // isolate the 8 bits we care about in |= (in >> 6); // combine the upper 6 and lower 2 bits
Code analysis
If you’re not interested in the nitty gritty details of the code changes I made, you can skip this section and go right to the results below.First, let’s look at what the original code did. When I first looked at it, I didn’t recognize bitWrite; apparently it’s not a well known Arduino bit manipulation macro; it’s defined as:
#define bitWrite(value, bit, bitvalue) (bitvalue ? bitSet(value, bit) : bitClear(value, bit))
This macro was written with the intention of being used on GPIO ports (the variable value) where the logical state of bitvalue would be turned into a single write of a 0 or 1 to the appropriate bit. It makes less sense to be used on a regular variable because it inserts a branch to switch between the two possible outcomes. For the task at hand, it’s not necessary to use bitClear() on the in variable since it’s already initialized to 0 before the start of each byte loop. A better choice would be:
if (*_dataPorts[k] & _dataMasks[k]) in |= (1 << k);
The arrays _dataPorts[] and _dataMasks[] contain the memory mapped GPIO port addresses and bit masks to directly access the GPIO pins (bypassing digitalRead). So here’s a play-by-play of what the original code was doing:
Set in to 0
Set k to 0
Read the address of the GPIO port from _dataPorts[] at index k
Read the bit mask of the GPIO port from _dataMasks[] at index k
Read 32-bit data from the GPIO port address
Logical AND the data with the mask
Shift 1 left by k bits to prepare for bitClear and bitSet
Compare the result of the AND to zero
Branch to bitSet() code if true or use bitClear() if false
bitClear or bitSet depending on the result
Increment loop variable k
Compare k to the constant value 8
Branch if less back to step 3
Repeat steps 3 through 13, 8 times
Store the byte in the data array (not shown above)
The new code does the following:
Read the 32-bit data from the GPIO port address
Shift it right by 2 bits
Logical AND (mask) the 8 bits we’re interested in
Shift and OR the results to form 8 continuous bits
Store the byte in the data array (not shown above)
Each of the steps listed above basically translates into a single Arm instruction. If we assume that each instruction takes roughly the same amount of time to execute (mostly true on Cortex-M), then old vs. new is 91 versus 5 instructions to capture each byte of camera data, an 18x improvement! If we’re capturing a QVGA frame (320x240x2 = 153600 bytes), that becomes many millions of extra instructions.
Results
The optimized byte capture code translates into 5 Arm instructions and allows the capture loop to now handle a setting of 5 FPS instead of 1 FPS. The FPS numbers don’t seem to be exact, but the original capture time (QVGA @ 1 FPS) was 1.5 seconds while the new capture time when set to 5 FPS is 0.393 seconds. I tested 10 FPS, but readFrame() doesn’t read the data correctly at that speed. I don’t have an oscilloscope handy to probe the signals to see why it’s failing. The code may be fast enough now (I think it is), but the sync signals may become too unstable at that speed. I’ll leave this as an exercise to the readers who have the equipment to see what happens to the signals at 10 FPS.
For the work I did on the OV767X library, I created a test fixture to make sure that the camera data was being received correctly. For ML/data processing applications, it’s not necessary to do this. The built-in camera test pattern can be used to confirm the integrity of the data by using a CRC32.
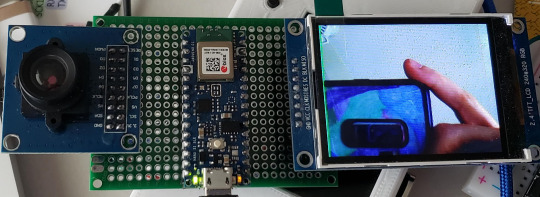
My tinned protoboard test fixture with 320×240 LCD
Note: The frames come one immediately after another. If you capture a frame and then do some processing and then try to capture another frame, you may hit the middle of the next frame when you call readFrame(). The code will then wait until the next VSync signal, so that frame’s capture time could be as much as 2x as long as a single frame time.
More tips
I enjoy testing the limits of embedded hardware, especially when it involves bits, bytes and pixels. I’ve written a few blog posts that explore the topics of speed and power usage if you’re interested in learning more about it.
Conclusion
The embedded microcontrollers available today are capable of handling jobs that were unimaginable just a few years ago.
Optimized ML solutions from Google and Edge Impulse are capable of running on low-cost, battery-powered boards (vision, vibration, audio, whatever sensor you want to monitor).
Python and Arduino programming environments can test your project idea with little effort.
Software can be written an infinite number of ways to accomplish the same task, but one constant remains: TANSTATFC (there ain’t no such thing as the fastest code).
Never assume the performance you’re seeing is what you’re stuck with. Think of existing libraries and generic APIs available through open source libraries and environments as a starting point.
Knowing a bit of info about the target platform can be helpful, but it’s not necessary to read the MCU datasheet. In the code above, the larger concept of Arm Cortex-M 32-bit GPIO ports was sufficient to accomplish the task without knowing the specifics of the nRF52’s I/O hardware.
Don’t be afraid to dig a little deeper and test every assumption.
If you encounter difficulties, the community is large and there are a ton of resources out there. Asking for help is a sign of strength, not weakness.
Optimizing a low-cost camera for machine vision was originally published on PlanetArduino
0 notes
Photo

V Neck Contrast Woven Dot Print Long Sleeve Knit Top. - 50688 by MayaOnMelroseAve on Storenvy
0 notes
Photo

35V Capacitor 1800uF Electrolytic Capacitors Ultra Low ESR 13X25mm XUANSN for Maintenance and Electronic Project Design https://news99india.in/35v-capacitor-1800uf-electrolytic-capacitors-ultra-low-esr-13x25mm-xuansn-for-maintenance-and-electronic-project-design/?feed_id=50688&_unique_id=5fb7abc6824ad
0 notes
Text
O româncă din Marea Britanie s-a oferit să testeze un vaccin anti-COVID (video)
O româncă din Marea Britanie s-a oferit să testeze un vaccin anti-COVID (video) #Covid #MareaBritanie #Novavax #româncă #UK #vaccin
Încă un vaccin anti-COVID a intrat în linie dreaptă. Medicamentul produs de Novavax este în faza de testare. Iar printre subiecții care vor participa la teste se află și o româncă stabilită în Marea Britanie.
De profesie avocat, românca din UK spune că s-a înscris în programul pentru vaccinul anti-COVID ca un gest de revoltă în fața unui dușman nevăzut și imprevizibil:
“E o reacție perfect…
View On WordPress
0 notes
Text
Таиланд пока не собирается открывать границы

Один из наиболее экзотических уголков планеты Таиланд пока не собирается открывать границы для туристов, власти опасаются второй волны коронавируса. Несмотря на очередное ослабление ограничительных мер, принятых в связи с распространением коронавируса нов��го типа с 1 июня, Таиланд пока не готов о... https://news1.ru/archives/50688
0 notes