#Ultraschallsensor
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Tumblr is available in 18 languages.
Text
Calliope Mini 3 Tutorial: Technik-Upgrade - Zwei Motoren separat steuern

Der Calliope Mini 3 verfügt über eine echte H-Brücke, mit welcher man zwei Motoren separat steuern kann. Dieses ist ein deutlicher Vorteil zur Vorgängerversion, denn dort konnte man die Motoren immer nur gleich laufen lassen. https://youtu.be/Gy6feiBBRls Im Beitrag DIY-Freude: 2WD Auto von Grund auf aufbauen habe ich dir erläutert, wie man ein 2WD aufbaut. Hier soll es nun darum gehen, wie du dieses mit dem Calliope Mini 3 steuern kannst.


Vorbereiten des 2WD Chassis für den Calliope Mini 3
Am 2WD Chassis findest du zwei DC-Motoren, an welche wir noch zwei Drähte anlöten müssen. Hier sind die Farben rot für Plus und schwarz für Minus im Vorteil. Da jedoch die Motoren je nach Polung der Spannung sich in unterschiedliche Richtungen drehen ist es zunächst eigentlich egal wo du welchen Draht anschließt.
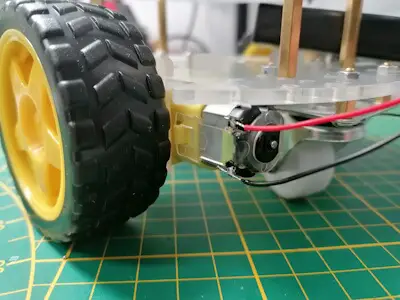
angelötete Litzen am DC-Motor
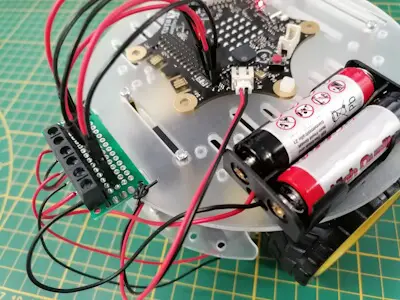
Anschlusspaneele für die Litzen
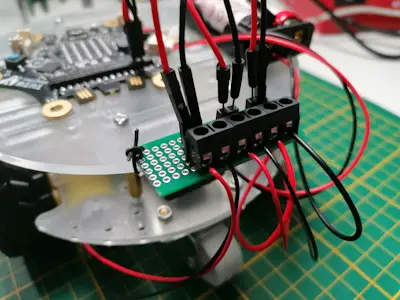
Anschlusspaneele für die Motoren und die Stromversorgung Von den beiden DC-Motoren und vom Batteriehalter kommen 6 Litzen insgesamt, diese müssen mit dem Calliope Mini verbunden werden. Dafür habe ich mir auf einer Lochrasterplatine 6 Schraubklemmen und ebenso drei 2er-Buchsenleisten aufgelötet und verbunden. Damit kann ich jetzt von diesen mit Breadboardkabel die Kontakte abgreifen und in die Buchsenleiste des Calliope Mini 3 stecken.
Montage des Calliope Mini auf der Acrylplatte
Mein 2WD Chassis hat zwei Acrylplatten, auf diese kann ich ganz einfach mit Kabelbinder diesen befestigen. Dazu stecke ich einen Kabelbinder durch einen Schlitz und schiebe auf diesen zwei weitere so das ich einen Abstand zwischen der Platte und dem Mikrocontroller erhalte.
Diesen gewonnenen Abstand benötigen wir, damit die Breadboardkabel / Jumperkabel in die Buchsenleiste eingesteckt werden können.
Programmieren der DC-Motoren in MakeCode am Calliope Mini 3
Nachdem wir die Motoren an den Mikrocontroller angeschlossen haben, können wir diese in MakeCode programmieren und damit unser 2WD Chassis steuern. Dazu haben wir unter dem Menüpunkt "Motoren" einen Block über welchen wir den Motor 1 "M0" und Motor 2 "M1" vorwärts (positiver Zahlenwert) und rückwärts (negativer Zahlenwert) fahren lassen können.
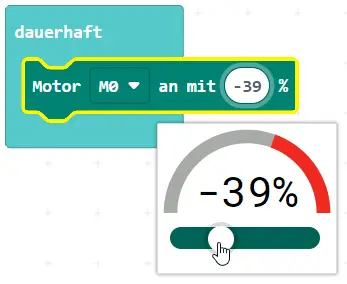
Calliope Mini - MakeCode - Motor rückwärtsfahren

Calliope Mini - MakeCode - Motor vorwärtsfahren Wie erwähnt können wir am neuen Calliope Mini 3 die Motoren separat in eine Richtung steuern und können somit engere Kreise ziehen, da wir einen Motor vorwärts und den anderen parallel dazu rückwärts laufen lassen können. Calliope Mini 3 auf 2WD Chassis In dem Video läuft ein kleines einfaches Programm, welches immer abwechselnd den linken & rechten Motor auf positiv 61 % laufen lässt und den anderen dann auf negativen 61 %.
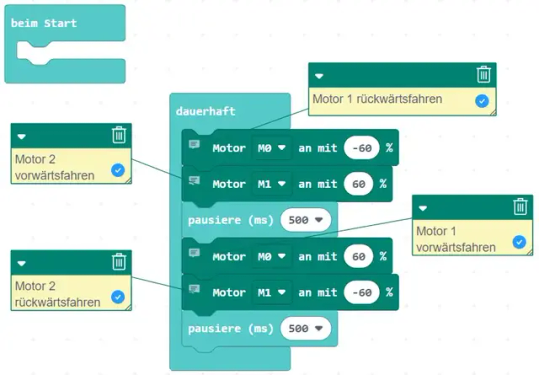
Programm zum steuern von DC-Motoren am Calliope Mini 3 Programm - Calliope Mini 3 - DC-Motoren steuernHerunterladen
Fazit & Ausblick
Um nun das kleine 2WD Auto autonom fahren zu lassen, bedarf es noch an einigen Sensoren wie Ultraschallsensor oder für die Linienverfolgung eines Helligkeitssensors. Wie du diese programmierst, zeige ich dir jedoch in separaten Beiträgen auf diesem Blog. Read the full article
0 notes
Text
STEYR zeigt „intelligentes“ Rad auf der IGW: Bodenschutz mit Ultraschall
STEYR zeigt „intelligentes“ Rad auf der IGW: Bodenschutz mit Ultraschall
Intelligentes Rad für mehr Bodenschutz / Optimierter Reifeninnendruck dank Ultraschallsensor / Verminderter Bodendruck und verbesserte Nachhaltigkeit / STEYR kooperiert mit BMBF-Projekt SoilAssist
Als Kooperationspartner des BMBF-Projekts SoilAssist setzt sich STEYR gemeinsam mit anderen Firmen für den Schutz landwirtschaftlich genutzter Böden ein. Das Thünen-Institut als Initiator des Projekts…
View On WordPress
0 notes
Text
Anwesenheitserkennung über Ultraschallsensor
Möglichkeiten zur Anwesenheitserkennung gibt in openHab viele. Ich habe es mit dem Network Binding und über Geolocation mit IFTTT versucht. Beide Varianten waren leider nicht so zuverlässig wie ich mir das gewünscht habe. Eine neue Lösung musste her. In meinem Fall bin ich immer dann anwesend, wenn mein Auto in der Garage steht und umgekehrt. Da liegt es nahe die Anwesenheit in Abhängigkeit vom…
View On WordPress
0 notes
Text
Metriken im Sport
Phase 1
Wie werden sportliche Leistungen gemessen und warum?
Egal welche Leistung im Sport erbracht wird, kommt es bei einer Bewertung dieser Leistung immer zu einem Leistungsvergleich, also einem Bezug zu anderen Vergleichsleistungen. Man wird mit seinen „Peers“ verglichen, es werden unterschiedliche Bewertungsmaßstäbe für Kinder, Jugendliche und Erwachsene, sowie Männer und Frauen erstellt. Leistungen können unter anderem in Zentimetern gemessen werden, in Gramm, Sekunden oder Häufigkeiten, sowie vielen weiteren Einheiten. Zusätzlich können sie durch Wertungsrichter beurteilt werden, dieser kann hinzugezogen werden, wenn es beispielsweise um eine ästhetische Ausführung geht. Die verschiedenen Formen des Wertens sind durch den Wettkampf entstanden, jedoch nicht nur für den Wettkampfsport allein.
Da bei manchen Sportarten in Gramm oder Sekunden gewertet wird, ist äußerte Genauigkeit bei der Aufnahme der sportlichen Leistungen notwendig. Dafür sind bestimmte technische Hilfsmittel notwendig. Eine zuverlässige und dazu noch kostengünstige Messungsmethode stellt vor allem die Videoerfassung im digitalen Zeitalter dar. Denn die die Technologie der Videoerfassung ist bereits so fortschrittlich, dass sie auch für extreme Situationen geeignet ist und mehrere Kameras miteinander synchronisiert werden können.
Ein weiteres Beispiel für eine häufig verwendete Dokumentation von Leistungen ist das Bildbasierte Objekttracking. Welches dazu dient, Bewegungssequenzen über einen längeren Zeitraum hinweg zu analysieren. Dies wird mithilfe von verschiedenen Sensoren einer Kamera, Laserscanner oder aber einem Ultraschallsensor getrackt.
Für die Analyse und der Bewertung der Ergebnisse sind jedoch in den meisten Fällen die Kenntnisse und Fähigkeiten eines Experten wichtig, der Auskunft über eine genaue Wertung geben kann. Jedoch kann es im Spitzensport herausfordernd sein, zwischen minimalen Unterschieden eine Entscheidung zu treffen.
Doch nicht nur im Spitzensport kommt es zum Einsatz von technischer Assistenz, sondern auch zunehmend im Breitensport und im Alltag von Personen. So haben die meisten Smartphones eine App auf dem Handy, die die Schritte von den Nutzern misst, Fitnessapps, in denen man die Gewichte und Wiederholungen eintragen kann, oder Wattzähler in Fahrradpedalen.

Phase 2
Warum treibe ich Sport?
Von Tracking bis zur Selbstoptimierung; Treiben Sportler diesen Trend zu sehr auf die Spitze?!
Der Sport als ideales Handlungsfeld der Vermessung eigener Daten zur ständigen Verbesserung und Selbstoptimierung. Eine konsistente Selbstvermessung erscheint bereits als „normal�� und sportliche Lebensführung ohne Self-Tracking kaum noch denkbar. Es stellt sich die Frage, ob sich Sport als einen Gesellschaftsbereich definieren lässt, in dem durch forciertes Self-Tracking allgemeine Tendenzen zur Spitze getrieben werden. Findet eine Verobjektivierung des eignen Körpers oder gar der Entwicklung eines nazistisch instrumentellen Selbstverständnisses, als Resultat neoliberaler Anforderungen der Leistungsgesellschaft statt?!
Die Mehrheit der Selftracker konzentriert sich lediglich auf einzelne Parameter, wie den Blutdruck und Blutzucker, zum Erhalt der Gesundheit oder der Beobachtung der als problematisch erachteten Verhaltensweisen. Es ist jedoch auch zu beobachten, dass Manipulation mit den eignes eingesetzten Selftracker betrieben wird. Die erhobenen Daten werden bewusst ausgewählt, sodass oftmals deprimierendes suspendiert wird und nicht wünschenswertes einfach nicht gemessen wird. Neben dem Prozess der eignen Selbsttäuschung lassen viele Nutzer nach gewisser Zeit aus diversen Gründen die Vermessungspraxis fallen, sodass Self-Tracking Praktiken eine sehr schlechte Nachhaltigkeit genießen. Nur die Hälfte derer, die einen Activity oder Fitness Tracker gekauft haben nutzt ihn immer noch. Im Sport werden seit jeher Körperdaten gesammelt zur Verbesserung und Optimierung sportlicher Leistung eingesetzt. Es handelt sich also um keine qualitative Neuentwicklung. Jedoch ist im breiten und Freizeitsport und Gesundheitssport ein struktureller Wandel entstanden. Durch Apps wie Runtastic und Co. erfährt der Amateurspor einen Professionalisierungsschub, sodass es auch normalen Durchschnittssportlern möglich ist auf einfache technische weise quasi professionelles Training zu erhalten. Die eingesetzten Geräte werden zum Personal Coach und es werden ganz individuelle Trainingspläne erstellt. Self-Tracking ermöglicht ein noch zielgerichteteres, noch effizienteres und noch optimaleres, auf sich persönlich abgestimmtes Training zu gestalten. Smarte Technologien können einen Beitrag dazu leisten Menschen, die bisher dem Sport fernblieben, in den Sport zu integrieren, sie zu motivieren und den eigenen Schweinehund zu überwinden.
Laut Sportwiussenschaftsstudent:innen der Uni Frankfurt gilt die Messung der Körperdaten nicht ausschließlich der Leistungssteigerung, dem sportlichen Rekordstreben oder der Körper und Selbstoptimierung. Die berufliche Anstellung, das Bestreben nach Selbstständigkeit, sowie das Wetteifern wurden als Beweggründe genannt. Die Vermessungspraktiken tragen ebenfalls zu einer Erhöhung des eigenen körperlichen Kapitals bei. Dies kann und soll zu außersportlichen Renditen führen, so die Studierenden. Gemeint sind damit besondere berufliche Chancen, eine Transformation in ein besseres soziales ökonomisches Kapital, oder das sichtbar machen der sportlichen Leistung. Letzteres stehe im Fokus und wird erst dadurch individuell und sozial relevant. Bezogen auf die Vermessung bedeutet das, dass eine Überführung von Flüchtigem (Training) in Handfestes (Aufzeichnungen) stattfindet. Die Vermessungstaktik als Praktik der Selbstberuhigung; man habe etwas wichtiges für sich und seine Zukunft getan. Zentral erscheint die Auseinandersetzung und Frage mit der eigenen Identität nicht nur als Sportler, sondern die Selbstverortung in einer Gesellschaft, die auf Anerkennung durch andere beruht. Somit wird ein eigener Zukunftsentwurf geschafften und es entsteht das Gefühl der einer eigenen Handlungsmacht.

Welche Rolle spielt der Leistungsdruck? Was für Emotionen spielen sich ab?
Angst, Stress, Stressoren und Copingstrategien
Emotionen, Stress und Coping beschreiben zentrale Themen in der Sportpsychologie. Die Differenzierung von Stressoren und deren Konsequenzen insbesondere in Bezug auf die Wettkampfangst stehen in Zusammenhang mit der individuellen kognitiven Bewertung. Demnach komme es vor allem auf die persönliche Interpretation des Sporttreibenden in der Situation an. Auch, wenn der Zusammenhang zwischen Emotionen und sportlicher Leistung nicht eindeutig zu bestimmen ist, wird durch vielfältige physiologische und kognitive Mechanismen die Bedeutsamkeit von der Kanalisation der Emotionen in eine gewünschte Richtung nahegelegt. Bei stetig steigender Einsetzung technischer Tracker und Unterstützungsmöglichkeiten, scheint es denkbar, neben der subjektiven Einschätzung von Stressoren auch objektivere Parameter heranziehen (z. B. Cortisol).
Talent (be)werten, welche Rolle spielt Talent im Sport?
Der Leistungssport beschreibt einen gesellschaftlichen Bereich, in dem Bewertungen eine zentrale Komponente ausmachen, basierend auf dem Prinzip formaler Chancengleichheit und Objektivität. Der Fokus liegt auf Leistungsunterschieden im öffentlichen Wettkampf. Jedoch finden bereits im Vorfeld Bewertungspraktiken wie Talentsichtungen statt, die oftmals zuallererst über die Möglichkeit einer Teilnahme an Wettkämpfen entscheiden. In diesem Kontext werden Diagnoseinstrumente zur Prognosen über potenzielle Leistungen erstellt. Aussagen über Leistungen beziehen dabei auf soziale Standards, also gesellschaftlich festgelegte Normen. Es wird nicht die Leistung gemessen, sondern die Kriterien für Leistung. Diese sind letztendlich nicht objektiv, sondern objektiviert und bilden ein System von sozialen Bewertungsstandards bilden. Hier gilt es zu wissen was für ein Talentverständnis im jeweiligen Bewertungskontext vorliegt. Talent kann demnach in der Sportwissenschaft sehr unterschiedlich konstruiert werden.
Die Wichtigkeit der Begriffsklärung von Talent und Sportpraxis wir durch die enge Verzahnung von Forschung zu vermeintlichen Talentmerkmalen, aus welchen Bewertungsverfahren und eine bestimmte Ausrichtung der Förderung resultieren. Das Talentkonstrukt ist maßgeblich entscheidend für die unterschiedlichen Prüfungen und Testinstrumente, die für Bewertung der vermeintlichen Talentmerkmale eingesetzt werden. Basierend auf den Ergebnissen findet eine Selektion für Förderprogramme statt. Disziplinübergreifend vereinen alle Verfahren die implizite Annahme, dass sich Talent oder einzelne Talentmerkmale unabhängig von der konkreten Sportpraxis in isolierten Bewertungssituation zeigen und objektiv bewerten lassen. Kritik kommt von Sportpraktiker:innen, dass solchen standardisierten Bewertungsverfahren an der Sportpraxis vorbei designet wären. Talentforschung bestehe nicht aus einem Mangel an Analysen und theoriegeleiteten Berechnungsaufwänden, sondern darin, dass die behaupteten Fakten mit der sportbezogenen Realität nicht konfrontiert und an ihr evaluiert würden.
Zunächst weisen Sichtungs-, Trainings- und Wettkampfpraktiken Überschneidungen bei den teleoaffektiven Strukturen auf: Im Training soll eine zukünftige Leistung entwickelt werden, die in der Sichtung bereits erkennbar sein und im Wettkampf schließlich erbracht werden soll. Diese Überschneidung führt jedoch erst durch die implizite Annahme der Formbarkeit von Talent und Leistung zu einer Verbindung der Praktiken im (Be)Wertungskontext.
In den (Be)Wertungslogiken wird auch eine zeitliche Komponente erkennbar, da bisherige Erfahrung als auch die potenzielle Entwicklungsdauer bis zum Höchstleistungsalter in die (Be)Wertung von Talent mit einfließen. Die (Be)Wertungen erfolgen praktikengebunden, denn es werden diejenigen Teilnehmer:innen als mitspielfähig anerkannt, die ein Gespür für die praktiken- und Arrangement spezifische Anforderungen an ihre jeweilige Position aufweisen. Talent(merkmale) abstrakt zu bestimmen, erscheint jedoch als schwierig, da Talent in Abhängigkeit von den jeweiligen Trainings-, Wettkampf- und Sichtungspraktiken völlig unterschiedlich operationalisiert wird. Die Kontextbedingungen müssen dargelegt werden, um die als wertvoll erachteten Merkmale hinreichend bewerten zu können. Mit einem praxistheoretischen Ansatz wird der Kontext als eine entscheidende Einflussgröße beschrieben. Mit Hilfe von praxeografischen Arbeiten kann die praktikenspezifische Bewertungslogik aufgeschlüsselt werden, um darüber ein tiefergehendes Verständnis von den als relevant erachteten (Be)Wertungskategorien zu erlangen.
Phase 3
Wettbewerb im Sport
Breitensport, mit zunehmendem Wettbewerbscharakter, die „ständige Olympiade“ und virtuelle Wettkampfgegner
Wie ist es dazu gekommen? Wie hat sich das ausgeweitet?
Das möglichst korrekte Erfassen von Bewegung in Zeit und Raum beschreibt ein zentrales Element moderner sportlicher Wettkämpfe. Angefangen beim Beispiel Messen von Zeiten auf Laufstrecken bis zur kombinierten Erfassung von Zeit und Raum bei Abseitsstellungen im Fußball. Der vielfältige Einsatz von technischen Hilfsmitteln in Kampf- und Schiedsgerichten im Sport ist keine Seltenheit mehr.
Doch es bleibt fraglich, ob ein Mehr an Technik zu besseren Entscheidungen im Sport führt. Raum und Zeit, als entscheidende Faktoren für die Entwicklung des modernen sportlichen Wettkampfes. Der Gesellschaftliche Wandel und die Industrialisierung in England erlaubten die Durchführung von Wettbewerben, die mit zumeist Pferderennen ihren Anfang nahm, mit dem Ziel der Unterhaltung. Hintergrund und Motiv solcher Wettbewerbe war jedoch nicht die Unterhaltung allein, sondern ein damit verbundener ökonomischer Zweck. Das Gewinnstreben durch Wetten. Die Wetten auf Sieg, Zeit und Distanz trugen somit maßgeblich zur korrekten Erfassung von Leistung und der Entwicklung verbindlicher Regelwerke, sowie der Vereinheitlichung von Zeiterfassungen, Distanzen und Abmessungen bei. Technische Hilfsmittel waren damals meist Stoppuhren zur Zeitmessung. Dadurch konnten Leistungen in Wettkämpfen an unterschiedlichen Orten und zu verschiedenen Zeiten miteinander verglichen und Rekorde erfasst werden. Technische Hilfsmittel waren demnach von Anfang an mit einer großen Bedeutung für die Entwicklung des modernen sportlichen Wettkampfes verknüpft. Mittlerweile nimmt die korrekte Messung von Zeit und Raum in vielen Sportarten eine zentrale Rolle ein. Ein anschauliches Beispiel ist der 100-Meter-Lauf in der Leichtathletik. Die genaue Erfassung der Leistung führt nicht nur zur Rangfolge innerhalb eines Rennens, sondern dient auch dem Vergleich zwischen unterschiedlichen Rennen oder dem Aufzeigen historischer Rekorde. Heute werden Leistungen nicht mehr mit einer manuellen Stoppuhr, sondern durch elektronische Zeitmesssysteme gemessen, welche eine Messung auf die 0,001 Sekunden vornehmen kann. Jedoch können auch die präzisesten Zeitmesssysteme nur so gut sein können wie die eingesetzten Geräte. Verdeutlichen lässt sich das mit dem Touchpad am Beckenrand. Dieses wird durch einen Druckkontakt ausgelöst, sodass es zu Verzerrungen kommen kann, wenn ein Schwimmer weniger Druck auf das Pad auslöst. Es stellt sich die Frage wie solche Verzerrungen bei komplexeren technischen Vorgängen wie der Videotechnik oder dem Videoassistenten behoben werden können. In der Debatte um den Einsatz von Technologie und Videotechnik zur Erfassung von Raum und Zeit im sportlichen Wettkampf scheint das menschliche Urteil nicht den Wertungsanforderungen des modernen Sports und denen für sportliche Wettkämpfe gut genug zu sein. Demnach müssen Entscheidungen technisch überprüft werden, um glaubwürdig zu sein. Der radikale Ansatz die Regeln des Sports neu schreiben zu müssen bezieht eine bewusste Gegenposition zur aktuellen Entwicklung, bei der immer mehr technische Hilfsmittel in den sportlichen Wettkampf eingebaut werden. Im Beispiel der Zeitmessung, des händischen, reaktionsverzögerten Stoppen, soll die Technik eine objektiviertere Leistungserfassung ermöglichen. In die generelle Debatte zwischen Menschen und Technik muss die Rolle von Kampf- und Schiedsrichter:innen bei der möglichst präzisen Erfassung von Leistung mit einbezogen werden.
Virtuelle Wettkampfgegner und -formen entstehen sowohl im Breiten als auch im Freizeitsport. Es werden Sportdaten ins Netz gespeist, um sie mit andren zu vergleichen, sodass es keinen realen „Lauf/Schwimm“ o.ä. gibt, sondern im Internet Referenzgrößen ersichtlich sind. In dem Zusammenhang ändern sich auch die Wettkampftrophäen.
Die professionelle Leistungsdiagnostik, basierend auf einer Vielzahl von Daten ist mittlerweile auch bei ambitionierten Hobbysportlern zu sehen. Der Markt wird beinahe überflutet mit diversem technischem Equipment, um es jedem zu ermöglichen die eigenen Grenzen vermessen zu können. Ist also die Sammlung persönlicher Leistungsdaten längst selbst zu einem Sport geworden? Dem Hobbyathlet mag es reichen sein "Grundbedürfnis nach Autonomie und Kompetenz zu befriedigen.
Meist werden die eigens Erhobenen Daten sofort im Internet publiziert. Anschließend kommt es in Communitys häufig zu Diskussion und Analyse des Veröffentlichten. Bei manchen Sportlern ersetzt die virtuelle Trainingsgruppe bereits den Lauftreff oder den Vereinssport. Messtechnik im Sport beschreibt kein Privileg mehr, da es jedem Hobbyathleten möglich ist mittels seines Smartphones das eigene Training selbst zu
Phase 4
Wechselwirkung Sport und Individuum
Bei vielen Menschen ist der Leistungsgedanke nachrangig. Vielmehr geht es um die Bewegung und Freude dabei. Das sich fit fühlen und frönen regelmäßig sportliche aktiv zu sein ohne Trainingsplan und Leistungsgedanken beschreit viele Hobbysportler. Es gibt viele Gründe, warum Menschen Sport treiben. Wer seine Leistung selbst misst, fühlt sich oft selbständiger und hat den Eindruck, seinen Körper kontrollieren zu können. Es entsteht eine neue Art der Selbsterfahrung. Das „gegen sich selbst antreten“ kann motivieren und Abwechslung bringen. Viele Faktoren spielen für das Erbringen und das Ziel des Erbringens sportlicher Leistung eine Rolle. Dies kann im sportlichen Wettbewerb oder dem Aufstellen persönlicher Bestleistungen gewidmet sein. Die Umwelt, soziale Faktoren, die Ernährung und Gesundheit, sowie die Psyche und Physis, als auch das Training und die Erholung und nicht zuletzt die genetischen Voraussetzungen gelten als Einflussfaktoren. In allen Bereichen spielt „Vermessung“ eine Rolle. Es geht darum die Situation so zu gestalten, dass eine optimale Leistung erreicht werden kann. Im sozialen zeigt sich dies vor allem in der Familie. Eine genaue Planung, wie die Vorbereitung auszusehen hat, mit genauen Absprachen, wann wichtige Ereignisse stattfinden, um am Tag X die bestmögliche Leistung vollbringen zu können. Somit kann das soziale Umfeld, seien es Freunde oder die Familie je nach Ausmaß von der sportlichen Betätigung beeinträchtigt sein. Im schlimmsten Fall kommt es zu einer Abkapselung oder gar soziale Isolation durch einen „Sportwahn“. Auch die Ernährung muss passgenau abgestimmt werden. Jedes Gramm an Protein, Kohlenhydraten und Fetten kann mittlerweile abgemessen werden. Auch die Frage, welche und wie viele Supplemente zu einer noch besseren sportlichen Leistung nötig sind können ambitionierte Sportler dabei beschäftigen. Funktioniert der eigenen Körper einmal nicht wie gewohnt nach Plan und die erwartetet Leistung kann nicht erbracht werden, kann das die mentale Verfassung durchaus beeinflussen. Die zu sehr zahlenfixierter Vorgehensweise beim Training geht dabei jedoch nicht automatisch mit einer höheren Effektivität einher. Die Rückmeldung des Körpers auf das Training gibt, sollte mehr als genauso wichtig wie die Ergebnisse des Messgeräts eingestuft werden. Die „Zahlensucht“ kann somit für manche gefährliche Auswirkungen haben. Zudem ist zu betonen, dass die Technik zwar Unterstützung leisten kann, aber keinen Trainer ersetzen kann, da sich die Qualität einer Bewegung nur durch die Augen eines Fachmanns bewerten lässt. Es scheint aber nur noch eine Frage der Zeit, bis diese Aufgabe von moderner Messtechnik übernommen wird. Wie bereits erwähnt hat die Psyche einen großen Einfluss, auf das Erbringen sportlicher Leistung. Es kann jedoch auch zu einer Veränderung der mentalen Einstellung und kurzfristigen Verfassung führen, wenn sportliche Aktivität regelmäßig praktiziert wird. Die Veränderung der Körperhaltung, Mimik und Gestik, hier vor allem in der mental angespannten Situation vor dem Wettkampf, ist möglicherweise ein Ergebnis. Eine generelle Stärkung des Selbstbewusstseins, sowie anderer Verhaltenskomponente von Emotionen werden verstärkt miteinbezogen und gezielt geschult. Das beobachtbare Verhalten des Sportlers hat vor allem im Leistungssport leistungsrelevante Konsequenzen sowohl für die Person selbst als auch für andere Personen, wie zum Beispiel Gegner oder Gegner:innen. Es stellt sich sodann die, ob eine solch starke Durchstrukturierung von Training und Erholung mit entsprechenden Do`s und Don´ts, sei es im Bereich der Ernährung oder Einschränkungen im sozialen Leben bereits als Vermessung des eigenen Lebens führt. Dem Leben in abgesteckten Bereichen gleichkommt. Im Zusammenhang mit Selftracking Praktiken zeigt sich jedoch keine Verdinglichung, sondern ein eher reflexiver Umgang mit aktueller Technologie. Ein entscheidender Grund, weshalb Selftracking Gadgets und Praktiken differenzierter und weniger wertend betrachtet werden sollten.
Verfasst von Mieke Strobach und Luisa Putnik.
Quellen
Grundlagen von Sport und Sportwissenschaft (2022). Verfügbar unter: https://link.springer.com/book/10.1007/978-3-662-53404-5 (letzter Zugriff: 21 Januar 2023).
Koch, R. (2018) ‘Prävention von Korruption und Manipulation im Sport’, in E. Hoven and M. Kubiciel (eds) Korruption im Sport. Nomos Verlagsgesellschaft mbH & Co. KG, pp. 165–174. Verfügbar unter: https://doi.org/10.5771/9783845289434-165.
‘Leistung sportliche’ Sport A-Z. Verfügbar unter: https://spolex.de/lexikon/leistung-sportliche/ (letzter Zugriff: 25 November 2022).
Pagani, A., Bailer, C. and Stricker, D. (2013) ‘Bildbasierte Messung und Analyse sportlicher Aktivitäten’, S. 11.
Gugutzer, R. und Duttweiler, S. (2015) "Ich habe das Gefühl etwas Wichtiges für mich und meine Zukunft zu run." Self-Tracking im Sport - mehr als kurzfristige Selbstoptimierung? Verfügbar unter: https://www.uni-frankfurt.de/57462629/Gugutzer-Duttweiler_Self-Tracking-im-Sport.pdf. Letzter Zugriff: 19. Oktober 2022.
DAK-Gesundheit (2022) Leistung messen und steigern. Verfügbar unter: https://www.dak.de/dak/fitwoch/leistung-messen-und-steigern-2547054.html. Letzter Zugriff: 10. November 2022.
Eberle, L. und Peschke, S. (2012) Sportler messen ihre Leistung: Geringer Nutzen für das Training - DER SPIEGEL. Verfügbar unter: https://www.spiegel.de/gesundheit/ernaehrung/sportler-messen-ihre-leistung-geringer-nutzen-fuer-das-training-a-827799.html. Letzter Zugriff: 26. Oktober 2022.
Wache, H. (2013) Sportliche Leistung bei Läufern ++ Leistungsfaktoren, Laufen total Online-Trainingsbetreuung. Verfügbar unter: https://www.laufen-total.de/lauftraining/sportliche-leistung-faktoren/. Letzter Zugriff: 10. November 2022.
1 note
·
View note
Text
Dieser Bericht auf dem Akustische Sensorenen. Markt ist eine exemplarische Vorgehensweise aller Marktdefinitionen, Charakterisierungen, Bündel und Marktmuster. Dieser Bericht ermöglicht das Verständnis des dynamischen Zustands, der Marktteilnehmer und der Antriebshersteller. Dieser Bericht über den Akustische Sensorenen-Markt ermutigt und erfasst, was die weltweiten Merkmale sind und wie die wichtigsten Akteure und Marken den Akustische Sensorenen-Markt in Bezug auf ihre Strömungsforschung, gemeinsame Bemühungen, Konsolidierungen, Artikelversand und Behauptungen auf globaler Ebene beherrschen. Der Bericht enthält Zahlen und Bewertungen für den Akustische Sensorenen-Markt weltweit und pro Provinz. Es bietet authentische Einblicke, die 2020 überlagern, Basisdaten, die 2021 überlagern, sowie Spurweitenmessungen, die 2022 bis 2028 überlagern, abhängig von Einkommen, Bezahlung, Import und Fahrpreis.
0 notes
Text
0 notes
Text
Arduino: Halloween Kürbis Projekt

Passend zur Halloween-Zeit, möchte ich ein Projekt mit dem Arduino und einem gedruckten Halloween Kürbis präsentieren.

Arduino: Halloween Kürbis Projekt Den Kopf habe ich mit transparentem Filament gedruckt. Da ich ultra, helle LEDs verwenden möchte, schleife ich diesen etwas an, so dass es später etwas diffuser wirkt.
benötigte Bauteile
Für dieses Projekt werden einige Bauteile benötigt, welche ich nachfolgend auflisten möchte: elektronische Bauteile - 1x Arduino Nano V3.0, - 1x Breadbord, 170 Pin, - 1x Ultraschallsensor HC-SR04, - 1x LED, 5 mm, ultra Hell, - 1x ISD1820 Bausatz, - 1x 220 Ohm Widerstand, - 1x Schalter, - 1x Batteriefach (zbsp. für 4x AAA Batterien), - 1x 9g Servo, - 14x Breadboardkabel, 20 cm, männlich - weiblich Zusätzlich wird noch ein Gehäuse benötigt und natürlich der Kürbiskopf. Ich habe diese Vorlage von Thingiverse.com heruntergeladen und gedruckt.
Werkzeuge
Um das Projekt aufzubauen, habe ich folgende Werkzeuge verwendet: - Bohrmaschine (vorzugsweise Akkubohrer), - diverse Holzbohrer - 15 mm, - 12 mm, - 10 mm - 5 mm - Laubsäge - Lötkolben - hitzebeständige Unterlage - Lötfett, - Lötzinn
Aufbau & Schaltung
Der gesamte Aufbau soll später in ein kleines Gehäuse passen, daher sieht es etwas nach Spagetti aus, wenn man den Deckel öffnet :)




Schaltung

Schaltung - Halloween Kürbiskopf
Programmierung
#include int servomotor = 5; int sound = 4; int led = 2; int trigger = 7; int echo = 6; Servo servo; int position = 0; const int waitTime = 15; const int PAUSE = 5000; long lastActionTime = -1; void setup() { Serial.begin(9600); pinMode(servomotor, OUTPUT); pinMode(sound, OUTPUT); pinMode(led, OUTPUT); pinMode(trigger, OUTPUT); pinMode(echo, INPUT); servo.attach(servomotor); } void loop() { int lengthEcho = readEcho(); long currentMillis = millis(); if (lastActionTime < (currentMillis - PAUSE)) { lastActionTime = currentMillis; Serial.println(lengthEcho); if (lengthEcho < 60) { Serial.println("loop"); digitalWrite(sound, HIGH); delay(500); digitalWrite(sound, LOW); movePumpkin(); } } } int readEcho(){ digitalWrite(trigger, LOW); delayMicroseconds(2); digitalWrite(trigger, HIGH); delayMicroseconds(10); digitalWrite(trigger, LOW); int cm = pulseIn(echo, HIGH) / 58.0; return (int(cm * 100.0)) / 100.0; } void movePumpkin() { boolean ledActive = false; Serial.println("moveP"); for (position = 0; position < 90; position++) { servo.write(position); ledActive = !ledActive; digitalWrite(led, ledActive?HIGH:LOW); delay(waitTime); } for (position = 90; position >= 1; position--) { servo.write(position); ledActive = !ledActive; digitalWrite(led, ledActive?HIGH:LOW); delay(waitTime); } lastActionTime = millis(); }
Video
Read the full article
#Arduino#ArduinoNano#ArduinoProjekt#Halloween#ISD1820#Kürbiskopf#LED#Leuchtdiode#Servomotor#Ultraschallsensor
1 note
·
View note
Photo

Samsung Galaxy S10, Zuverlässigkeitsprobleme für den biometrischen Ultraschallsensor Es war Mitte Februar, als Samsungs Südkoreaner ihr Top-Geschäft auf den Markt brachten. Dies ist die gesamte Serie von…
0 notes
Text
LEGO MINDSTORMS KOSTENLOS DOWNLOADEN
In anderen Projekten Commons. Schlussbemerkung Wer glaubt, einer der Bausätze sei allein zum Spielen da, der andere zum Lernen, dem sei gesagt, dass es immer um spielerisches Lernen geht. Über NI Seit über 40 Jahren stellt NI leistungsfähige automatisierte Testsysteme und automatisierte Messsysteme bereit, um Ingenieure und Wissenschaftler bei der Bewältigung technischer Herausforderungen jetzt und auch in Zukunft zu unterstützen. Wer glaubt, einer der Bausätze sei allein zum Spielen da, der andere zum Lernen, dem sei gesagt, dass es immer um spielerisches Lernen geht. Für Lego geh��rt dieser Marketingkanal zu der von vielen Spielzeugherstellern fokussierten lebenslangen Bindung der Kunden zu den Produkten bzw. So lernen schon Studenten den Umgang mit den gleichen Programmierwerkzeugen, die von den innovativsten Ingenieuren und Wissenschaftlern der Welt verwendet werden.
Name: lego mindstorms Format: ZIP-Archiv Betriebssysteme: Windows, Mac, Android, iOS Lizenz: Nur zur personlichen verwendung Größe: 63.90 MBytes
Aufgrund der intuitiven grafischen Programmierung und der möglichen Anbindung von LabVIEW an tausende Sensoren, Geräte und Systeme gelingt der schnelle Entwurf komplexer und leistungsstarker Roboterprojekte allen Anwendern unabhängig von ihren Vorkenntnissen. Für Lego gehört dieser Marketingkanal zu der von vielen Spielzeugherstellern fokussierten lebenslangen Bindung der Kunden zu den Produkten bzw. This site uses cookies to offer you a better browsing experience. Ansichten Lesen Bearbeiten Quelltext bearbeiten Mindsstorms. Obwohl das Produkt ein technisches Spielzeug ist, kann es ebenso wie von Lego und dem MIT ursprünglich auch als Marketingkanal geplant als Mondstorms eingesetzt werden. Navigation Hauptseite Themenportale Zufälliger Artikel.
Zusatzlich zum Content Editor bietet die Software auch Tools zur Datenerhebungdie für Unterrichtszwecke sehr praktisch sind.
Möglicherweise imndstorms die Inhalte jeweils zusätzlichen Bedingungen. Beinahe alle Arten von mechanischen Anlagen mit eingebetteten Systemen, von der Aufzugsanlage bis hin zu Industrierobotern, können mit Mindstorms nachgebaut werden.
Unsere Projekte
Wer glaubt, einer der Bausätze sei allein zum Spielen da, der andere zum Lernen, dem sei gesagt, dass es immer um spielerisches Lernen geht. Bei Fragen zu den Bildern wenden Sie sich an info. In anderen Projekten Commons. Es handelt sich dabei um die gleiche Programmiersoftware, die in praktisch jeder Industrie eingesetzt wird, mindstroms hervorragende Ingenieurleistungen zu ermöglichen, z.
youtube
Für Lego gehört dieser Marketingkanal zu der von vielen Spielzeugherstellern fokussierten lebenslangen Bindung der Kunden zu den Produkten bzw. Zusätzlich zu diesen Servomotoren sind drei Sensoren vorhanden: Auch die Software der älteren Versionen kann durch ein Update auf den neusten Stand aktualisiert werden. Damit sind lebo imposante Modelle wie der Elefant möglich.
LEGO® MINDSTORMS® – LEGOLAND® Deutschland Resort
mimdstorms Zusätzlich zu diesen Servomotoren sind drei Sensoren vorhanden:. So lernen schon Studenten den Umgang mit den gleichen Programmierwerkzeugen, die von den innovativsten Ingenieuren und Wissenschaftlern der Welt verwendet werden.
Legoo die neueste Version ist voller Steine, Sensoren und Motorendie nur darauf warten, bei Roboterprojekten eingesetzt zu werden! Navigation Hauptseite Themenportale Zufälliger Artikel.
Lego Mindstorms
Motoren, Sensoren und Batterie: Schlussbemerkung Wer glaubt, einer der Bausätze sei allein zum Spielen da, der andere zum Lernen, dem sei gesagt, dass es mindstorma um spielerisches Lernen geht. So werden Studenten bei der Entwicklung ihrer Fähigkeiten während der gesamten Ausbildungszeit unterstützt und optimal auf das Berufsleben vorbereitet.
Diese Seite wurde zuletzt am Learn more about our privacy policy. Eine Ergänzung zu Mindstorms stellen die Lego Spybotics dar, die einen programmierbaren Mimdstorms mit kindstorms Motoren mindstoms Sensoren besitzen.
Navigationsmenü
This site uses cookies to offer you a better browsing experience. Unsere offene, softwaredefinierte Plattform basiert auf modularer Hardware und einem stetig wachsenden Ecosystem, sodass Anwender ihre innovativen Ideen leichter in reale Lösungen umsetzen können.
Zwischenzeitlich ist die Version NXT 2. Über NI Seit über 40 Jahren stellt NI leistungsfähige automatisierte Testsysteme und automatisierte Messsysteme bereit, um Ingenieure und Mindstorks bei der Bewältigung technischer Herausforderungen mindstorjs und auch in Zukunft zu unterstützen.
Sie können sogar beide Programme auf ein und demselben Computer installieren!
Startseite – Mindstorms
Seit über 40 Jahren stellt NI leistungsfähige automatisierte Testsysteme und automatisierte Messsysteme bereit, um Ingenieure und Wissenschaftler bei der Bewältigung technischer Herausforderungen jetzt und auch in Zukunft ,ego unterstützen. Aufgrund der intuitiven grafischen Programmierung und der möglichen Anbindung von LabVIEW an tausende Sensoren, Geräte und Systeme gelingt der schnelle Entwurf komplexer und leistungsstarker Roboterprojekte allen Anwendern unabhängig nindstorms ihren Vorkenntnissen.
Vorläufer der Mindstorms-Serie war der Cybermaster.
youtube
Durch die Nutzung dieser Website erklären Sie sich mit den Nutzungsbedingungen und der Datenschutzrichtlinie einverstanden. In diesem Zusammenhang können auch handlungsorientiert informatische Grundlagen wie das EVA-Prinzip und Kontrollstrukturen behandelt werden.
Folgt uns auf:
März um Ansichten Lesen Bearbeiten Quelltext bearbeiten Versionsgeschichte. Allerdings ist der Ultraschallsensor wesentlich präziser bei der Entfernungserkennung — ein wichtiges Detail, je nachdem, welcher Roboter gebaut werden soll. April — National Instruments Nasdaq: Wir empfehlen, die Software bereits vor dem Mindstormms herunterzuladenum sicherzustellen, dass Hard- und Softwareprogramme der erforderlichen Mindestkonfiguration entsprechen.
The post LEGO MINDSTORMS KOSTENLOS DOWNLOADEN appeared first on Mezitli.
source http://mezitli.info/lego-mindstorms-98/
0 notes
Text
Er macht Herrenberg zur Smart City
In der Herrenberger Kommunalverwaltung ist die Welt mittagspausentechnisch noch in Ordnung. Die Empfangsdame erwidert die Frage nach dem Amtsleiter mit einem auffälligen Blick auf die Armbanduhr. Diese zeigt zum Glück bereits 13:02 Uhr, die Mittagspause ist also seit zwei Minuten offiziell beendet. Daher wird die erbetene Auskunft erteilt: Zu Herrn Kraus bitte einmal rechts und dann den Gang lang.
Stefan Kraus trägt an diesem Tag ein weißes Hemd unter grau-braunem Pullunder, dazu Turnschuhe: das perfekte Verwalteroutfit für den Chef des Herrenberger Amts für Technik, Umwelt und Grün. Spielplätze, Blumenbeete, Mülleimer sind Pflichtaufgaben des 51-Jährigen. Die Kür: Herrenberg und seine Stadtverwaltung zur digitalen Vorzeigekommune zu machen, zur Smart City. Bitte was?
In der Politik reden derzeit alle über Digitalisierung. Länder und Bundessregierung setzen mit großer Vorliebe Digitalstrategien auf, beschließen Förderkriterien, verteilen Beträge mit vielen Nullen am Ende. Per Ministerbeschluss in die Zukunft: Das Programm in Baden-Württemberg heißt „digital@bw“, soll das Land zur „Leitregion des digitalen Wandels“ machen und kostet dieses und nächstes Jahr rund 300 Millionen Euro. Das Geld ist da, nach Ideen und Projekten wird noch gesucht.
Muss der Winterdienst raus? Der Sensor weiß es
In Herrenberg haben sie schon mal losgelegt. Die 30 000-Einwohner-Stadt im Schönbuch hat mit dem digitalen Wandel längst begonnen, er kostet auch nur ein paar Tausend Euro. Was nicht zuletzt an Stefan Kraus liegt, dem smarten Amtschef im biederen Outfit. Seine neueste Errungenschaft ist ein Sensor, der mit der nebenan errichteten Wetterstation kommuniziert und erkennt, ob der Winterdienst ausrücken muss oder nicht – was viele Tausend Euro Personalkosten sparen kann.
„Alle sagen, dass man mit dem Digitalen irgendwie vorankommen muss. Aber kaum einer macht was“, ärgert sich Kraus. Die Digitalstrategie der Landesregierung? „Alles Metaprojekte, von oben verordnet.“ Von den Projekten in seinem Amt sagt Kraus: „Das sind Sachen, die jeder versteht.“
Zum IT-Boy wurde er mehr durch Zufall. Kraus’ erster Schritt in die digitale Zukunft war ein Blog. Gut ein Jahr lang war er bereits Amtsleiter, als er beschloss, in einem Online-Tagebuch über die Tätigkeiten seiner Kollegen zu berichten. Man kann nachlesen, wie die Verwaltung mit 80 Bürgern einen Spielplatz neu gestaltet oder dass Kraus enttäuscht ist über die geringe Teilnehmerzahl eines Workshops zur Sommerbepflanzung. Der Blog nennt Standorte von Hundestationen und stellt Ideen von der digitalen Pinnwand vor, einer Internetseite für Bürgerbeteiligung.
Technische Dienste goes digital
Vor gut einem Jahr veröffentlichte Stefan Kraus den Beitrag „Technische Dienste goes digital“. Gemeinsam mit der Verwaltungshochschule Ludwigsburg hat sein Amt überlegt, wie es modern werden kann. Eine Idee war, den Rasen im städtischen Stadion automatisch mähen zu lassen. Das spart zwar mehrere Zehntausend Euro, kommt in Zeiten omnipräsenter Roboterrasenmäher in den Gärten von Einfamilienhäusern aber nur mäßig innovativ daher. Eindruck schindet Stefan Kraus eher mit seinen intelligenten Mülleimern. 30 solcher Abfallkübel gibt es bereits. Sie digital aufzurüsten „war alles andere als trivial“. Sagt er und lädt zu einer Spritzfahrt durch die Smart City Herrenberg.
Im Auto erzählt Kraus von seinem Werdegang. Er wuchs in der Gegend auf. Ein technischer Mensch ist er schon immer gewesen. Nach dem Hauptschulabschluss kam er auf dem zweiten Bildungsweg an die Fachhochschule Sigmaringen. Eigentlich wollte er Maschinenbauer werden, kam aber erst nicht in den Studiengang und wollte irgendwann auch nicht mehr wechseln. Den Diplomingenieur hat er dann in Ernährungs- und Hygienetechnik gemacht. Nach Jobs in der Industrie wechselte er zur Tübinger Frauenklinik, von dort zur Stadtverwaltung Herrenberg.
„So frei wie hier habe ich noch nie arbeiten dürfen“, schwärmt Kraus, „unser Oberbürgermeister sagt immer, bei ihm sei Spinnen erlaubt. Darum geht’s!“ Kraus überlegt auch, wie er seine Mitarbeiter motivieren kann. Erst kürzlich hat er durchgesetzt, dass eine Meisterstelle nicht nachbesetzt wird und die Arbeiter sich selbst managen – gegen einen Gehaltszuschlag, versteht sich. „Arbeiten am System statt Arbeiten im System“ nennt er das.
Alte Häuser, neue Mülleimer
Das Auto kurvt durch die engen Altstadtgassen und hält am Marktplatz. Zwischen alten Fachwerkhäusern steht ein neuer Mülleimer. Kraus geht ein paar Treppen Richtung Kirchgasse hoch und klappt den Metallzylinder um. Man sieht Abfall – und einen Ultraschallsensor. Der erkennt von selbst, wenn der Mülleimer voll ist und meldet das per Funk an die Stadtreinigung – die nicht länger stur alle zwei Wochen kommt, sondern nur noch wirklich volle Mülleimer leert. Das spart Arbeit.
Weiter geht die Spritztour auf den Schlossberg. Ein paar Schritte durch die alten Gemäuer, dann kurz rechts auf den Trampelpfad, und schon steht man im Gebüsch über der Stadt und sieht auf einem Lichtmasten montiert Kraus’ ganzen Stolz: eine Lorawan-Antenne. Lorawan ist der Fachbegriff für ein großräumiges digitales Funknetz. Sensoren können dorthin Daten übertragen – ganz gleich, ob sie in Mülleimern stecken oder irgendwo anders.
Im Rathaus musste Kraus erst einmal erklären, warum so eine Antenne wichtig ist. „Ich wollte das einfach lieber selbst machen anstatt es kommerziellen Anbietern zu überlassen“, sagt er und zieht einen Brief von Unitymedia heraus: die Firma, die einst Kabel BW hieß, wittert Umsätze und bezirzt seit einiger Zeit Verwaltungen in ganz Deutschland. „Wenn die ihre Antennen aufbauen, kostet uns das mehr, und die Daten gehören der Firma. Die wollen bloß Geld verdienen“, sagt Stefan Kraus. Sein städtisches Netz hingegen können die Bürger kostenlos nutzen und nach Gusto eigene Sensoren aufhängen, mit denen sie den Lärm, die Luftqualität oder was auch immer messen.
Auf die Idee mit dem Lorawan ist Kraus im Shackspace gekommen. Einmal im Monat schaut er in dem ehemaligen Bürogebäude in Stuttgart-Wangen vorbei. Dort treffen computerverliebte Hacker auf lötkolbenversierte Macher und machen gemeinsam so etwas wie Lego Technic für Fortgeschrittene.
Hier hat Kraus seine Ideen und Kontakte her. Allein hätte er die Antenne am Schlossberg auch nicht installiert bekommen, das gibt er zu. Sein Job ist vielmehr, die Kollegen im Rathaus von der Technik zu überzeugen. Dass er fließend Verwaltungsdeutsch spricht, hilft ihm dabei: „Ich mache typische Geschäftsprozessoptimierung.“
Da entsteht gerade ein Markt
Sein wichtigstes Argument ist, dass er dank der Technik Aufgaben schneller und billiger erledigt bekommt. Deshalb entsteht da gerade ein Markt. Längst gibt es kommerzielle Anbieter, auch und gerade in Baden-Württemberg: die Stuttgarter Firma Binando digitalisiert die Müllverwaltung, Bosch Sensortecbaut die nötigen Sensoren, die EnBW vermarktet Straßenlaternen, die auch Feinstaub messen. „Es gibt Sensoren, die erkennen, ob ein Baum gerade Stress hat“, ruft Kraus begeistert. Herrenberg ist der Zukunft höchstens einen Schritt voraus. Aber das ist immer noch besser, als hinterherzuhinken.
Gleichgesinnte in anderen Rathäusern kenne er kaum. Verwalter mögen klare Abläufe lieber als IT-Experimente. Umso verwunderlicher, dass Kraus nicht längst offizieller Botschafter für Winfried Kretschmanns Digitalstrategie ist: Er hat Ideen, ist begeistert von ihnen und stets bereit, andere zu begeistern. Ein paar Fördergelder fließen: Herrenberg kriegt 40 000 Euro aus der Digitalstrategie und ist von der Bundesregierung zu einer von fünf Modellkommunen ernannt worden, die infolge des Dieselskandals die Luftqualität verbessern wollen. Nächstes Jahr will Kraus weitere 50 Mülleimer smart machen und dank Hunderter neuer Sensoren im Boden dann immer wissen, welche Parkplätze belegt sind und wo jemand im absoluten Halteverbot steht.
Mit der digitalen Zukunft, das zeigt die smarte Stadtrundfahrt, experimentiert es sich in einer 30 000-Einwohner-Stadt leichter als in Stuttgart. Oder, wie Stefan Kraus sagt: „Wir haben gerade einen Lauf, sexy Themen und kurze Wege in der Verwaltung.“
(Stuttgarter Zeitung, Reportage, 7. Dezember 2018)
0 notes
Text
Restwasserdosierung
Laut dem Bundesamt für Umwelt BAFU sind die Wasserkraftwerke gehalten Restwassermengen in die Fliessgewässer abzugeben. -> http://www.bafu.admin.ch/wasser/13465/13486/14117/index.html?lang=de
Stutz-Werk im Schwändital Näfels

Für diese Stau-stufe steht 30 l/s als Vorgabe der Abgabemenge.
Somit steht die Frage nach dem Konzept für die Realisierung an.
Das Staubecken Stutz ist im Untergrund mit einem Sammler versehen, welches das Sickerwasser und eine kleine Quelle erfasst. Die anfallende Wassermenge wird mit einer Pumpe in das Becken hoch gefördert; sofern kein Überlauf besteht; um so zusätzliches Turbinenwasser bereit zu stellen. Anderenfalls fliesst das Wasser via Überlaufrohr zum Tosbecken. Somit war es naheliegend dieses Sickerwasser-Volumen für die Abgabe zu nutzen.

Das dargestellte online HMI-Bild zeigt die Pumpe in Bereitschaft; gelb. Diese startet, wenn das Schacht-Niveau 142cm überschreitet und regelt dieses via FU.
Der Druck 27.49bar gilt nicht vor Ort, sondern entspricht dem Tal-Messwert!
Die 10.16 l/s sind die Dosiermenge; durch Stellglied Y-41.7 geregelt; welche aus der Druckleitung entnommen wird. Diese wird zum Quell- und Sickerwasser-Zufluss, für die benötigten 30 l/s Restwasser, zugeführt.
Die rote Markierung stellt die Blende Ø117.5mm dar.
Um die Abgabe-Menge konstant zu halten, sind jedoch einige Bedingungen für die Regelung zu berücksichtigen, zumal das System dynamisch zum Wasseraufkommen nachgeführt werden muss und flexibel gehalten sein will; da die Vorgabe in Zukunft durchaus neu festgelegt werden kann.
Torricellis Theorem der Ausflussgeschwindigkeit
Laut Torricellis Theorem hängt die Ausflussgeschwindigkeit ausschliesslich von der Druckhöhe und nicht von der Natur der Flüssigkeit ab.
Für die Höhenbestimmung ist von Wichtigkeit, dass von kreisförmiger Öffnung ausgegangen wird, sonst treten zusätzliche Faktoren, wie Reibungsverluste in Ecken u.s.w. auf, welche den Faktor µ stark beeinflussen.
Als Ideal gilt eine horizontale Blende, so wäre der Druck auf der ganzen Austrittsfläche mit der entsprechenden Austrittsgeschwindigkeit gleich. Das aber bedingt, dass der Strahl in der senkrechten Fortsetzung nicht behindert werden darf.
Bei senkrechter Blende muss von der Achse aus gerechnet werden. Mit der Annahme, dass das Wasser unterhalb der Achse um den gleichen Faktor mehr Beschleunigt wird, wie der Obige langsamer austritt. Schon aus dieser Betrachtung wird sichtbar, dass je grösser die Druckhöhe gewählt ist, um so geringer wird der Fehler in diesem Summen-spiel ausfallen, weil der Blenden-Durchmesser kleiner und entsprechend die Beschleunigungs-Differenzen vernachlässigbar werden!
Grosse Blenden mit geringer Druckhöhe sind schon von daher nur schlecht berechenbar.
Durch konvergieren der Flüssigkeit zur Düsenöffnung wirkt ein Teil der Beschleunigung nicht linear zur Achse, was zu Energieverlust im Bezug der tatsächlichen Beschleunigung führt, was den Wert µ=0.61 vorbestimmt. Von hier aus kann er nur schlechter werden!
Bei der Standardberechnung wird von µ=0.61 ausgegangen. Bessere Werte sind im Prinzip nur durch Unterdruck im Abfluss zu erreichen!
Es ist daher müssig einen Wert von µ> 0.61 zu betrachten...
Der Dosierrohr-Einlass muss möglichst hoch liegen, damit die Dosierblende einen grossen Höhenunterschied zum Wasserspiegel aufweist. Je grösser die Differenz ist, je kleiner muss die Blende gehalten sein und die Instabilität des Niveaus führt demzufolge zu kleineren Dosierschwankungen! (als Grenze für eine vernünftige Regelung bei > 10l/s sehe ich >= 1m Niveau-Differenz).
Der Wasserspiegel im Dosierbetrieb muss eine ausreichende Überhöhung zum Dosierrohr-Einlass aufweisen, sonst kommt es zu grossen Beschleunigungen über der Rohr-Kannte, was zu instabiler Strömung führt und Wirbelbildung Vorschub leistet. Dadurch wird eine genaue Dosierung verhindert. (als Faustregel Differenz = 1*Dosier-Rohrdurchmesser)
Das Dosierrohr sollte bis zur Blende mindestens den doppelten Durchlass des Blenden-Durchmesser haben, sonst kommen Reibungsverluste die schwer beherrschbar sind zum tragen.
Nach der Blende muss der Abfluss unbehindert erfolgen! Es empfiehlt sich daher:
Jede Steigung z.B. Siphon muss unterlassen werden.
Bogen, insbesondere mit engen Radien vermeiden.
Die Lichtweite mindestens mit 2*Blende auslegen.
Bei der Soll-Pegelberechnung muss berücksichtigt werden wie die Blende eingebaut ist. Liegt diese waagerecht, so gilt die Austritts-kannte als Referenz 0.0. Steht diese jedoch senkrecht, so muss die horizontale Achse als Referenz 0.0 betrachtet werden.
Die folgenden drei Tabellen zeigen wie die Auswahl der Blende erfolgt. Wir hatten Baulich bedingt festgelegt, dass unser Schacht-Niveau von =< 1.500 liegen darf.
Da der Schacht-Grund zur Blenden-Achse 0.350m tiefer liegt ist der Referenzwert für die Berechnung <=1.150 m!

Blende ist mit µ0.61 zu klein, da der Durchfluss 30l/s erst mit einem Niveau von 1.145m (+0.350 = 1.495m) erreicht wird, so bleibt keine Toleranz für eine spätere Erhöhung übrig. Ein allfälliges schlechteres µ / <0.61 (gestörter Abfluss) kann von vornherein so nicht kompensiert werden.

Aus dieser Tabelle geht hervor => 30 l/s bei µ0.61 Niveau 1.045 (+0.350=1.395)m erreicht wird (da unsere Leitungsführung mit Sollwert 1.395m optimal liegt, hat sich das durch Prüfmessung bestätigt).

Blende hat in unserem Falle zu grossen Durchfluss.
Wie aus dem Geschilderten ersichtlich ist, bedarf ein solches System jedoch einer präzisen, -mm genauen Regelung. Grundvoraussetzungen dazu sind:
ein genaues Messsystem ± 0.05 mm. Eine unterflurige Druckmessung ist zumeist örtlich nicht realisierbar. Eine Tauchdrucksonde bringt den Nachteil mit sich, dass Schlammeintrag zum Messwert-Fehler bis -Ausfall führt und daher beständige problematische Wartung erfordert (Becken muss entleert und gespült werden). Darum empfiehlt sich eine Wasserspiegel-Erkennung. Diese kann Optisch; Reflexionssonde; die aber durch Staubeintrag erblinden kann. Mit Sonar; Ultraschallsensor; diese kann jedoch durch Insekten gestört werden. Das bedeutet: Alle Systeme sind nicht 100% Wartungsfrei, regelmässige Reinigung und Messwertreferenzierung ist notwendig (Wartungsplan).
Wellen verhindernde Nach-Dotierung; Messwert-Schwingungen; was grossen Rohrquerschnitt bedingt. Dazu muss sowohl der Wasser- Zufluss wie -Abfluss möglichst weit entfernt der Niveau-Messung und tief unter dem Wasserspiegel gehalten sein.
Regelschwingungen wollen vermieden sein! Da die Dotierung auf geringe Abweichung mit grossen ±Mengen antwortet (siehe Blenden-Kurven) muss das Niveau sehr genau gehalten werden. Das ist um so schwieriger zu erreichen je kleiner das Fassungsvermögen des Sammlers ist, denn umso dynamischer muss dann der Regler arbeiten.
sm/tbgn 10.11.2016
0 notes
Text
Ihr braucht keinen teuren Quadrocopter, um rasende Flüge aus der First-Person-Sicht zu überstehen. Die Mambo FPV von Parrot bringt Highspeed zum günstigen Preis.
Die Mambo FPV geht preislich schon ab 109 Euro (UVP) los, ist also deutlich billiger als eine Profi-Lösung zum Beispiel von DJI. Geboten wird euch im Grunde alles, was ihr für flotte Flugmanöver braucht. Mit bis zu 30 km/h düst die kleine Drohne umher, dank Drei-Achsen-Beschleunigungsmesser und Drei-Achsen-Gyroskop sowie Ultraschallsensor und Drucksensor bleibt sie stabil.
Klein, mit aufsteckbarer Kamera und VR-Brille. (Foto: Parrot)
Ihr steuert die Mambo FPV über Bluetooth mit eurem Smartphone, präziser dürfte die Kontrolle mit dem Parrot Flypad sein. Das ist ein Controller im Stil eines Gamepads, der über einstellbare Joysticks und Bedienknöpfe sowie eine Reichweite von bis zu 100m verfügt. Ohnehin gibt’s allerlei Modi für Einsteiger und Profis.
Parrot Mambo FPV. (Foto: Parrot)
Parrot Mambo FPV. (Foto: Parrot)
Parrot Mambo FPV. (Foto: Parrot)
Parrot Mambo FPV. (Foto: Parrot)
Parrot Mambo im FPV-Modus
Interessant ist zudem der FPV-Modus. Durch die mitgelieferten Cockpitglasses 2 seht ihr das Geschehen aus dere Ego-Sicht. Euer Smartphone streamt die Inhalte von dem Quadrocopter zur Brille, ein Blickfeld von 96 Grad wird versprochen. Die fest verbaute VGA-Kamera mit 0,3 Megapixeln ist glücklicherweise nicht für die Inhalte verantwortlich, sondern eine zusätzliche HD-Cam mit 120 Grad-Sichtfeld und 720p-Aulösung. Die wird direkt auf den Copter gesteckt und bringt Videos sowie Fotos direkt zum Mobilktelefon. Ansonsten werden Daten auf einer microSD-Speicherkarte gesichert.
Für besagte 109 Euro erhaltet ihr quasi das Einstiegspaket der Mambo FPV. Möchtet ihr keine Kompromisse eingehen, werden 179 Euro (UVP) fällig. Im Preis inbegriffen sind der Controller, die Cockpitglasses 2-Brille, die zusätzliche HD-Kamera und ein Propellerschutz. In jedem Fall hält der Akku bis zu 10 Minuten, bevor er wieder aufgeladen werden soll.
Die erhältlichen Bundles
Parrot Mambo Fly 1 Parrot Mambo 1 Set Propellerschutz 1 Batterie 1 USB/Micro USB-Kabel 1 Quick Start Guide UVP: 109 €
Parrot Mambo Mission 1 Parrot Mambo 1 Cannon 1 Grabber 1 Clip 1 Parrot Flypad 1 Set Propellerschutz 1 Power batterie 1 USB/Micro USB-Kabel 1 Quick Start Guide UVP: 159 €
Parrot Mambo FPV 1 Parrot Mambo 1 FPV HD-Kamera 1 Parrot Cockpitglasses 2 1 Parrot Flypad 1 Set Propellerschutz 1 Power batterie 1 USB/Micro USB-Kabel 1 Quick Start Guide UVP: 179
Für mich klingt das wirklich nach einem interessanten Highspeed-Drohnen-Paket mit FPV-Feature. Nicht zu teuer, aber auch kein wertloser Plunder – könnte spaßig sein. Ab diesen Monat ist die Mambo FPV erhältlich, darunter bei Amazon. Dort ist derzeit nur die normale und bereits seit längerer Zeit verfügbare Minidrone Mambo verfügbar. Das neueste Modell folgt sicher in Kürze.
Diese Highspeed-Drohne erlebt ihr aus der Ego-Perspektive! Ihr braucht keinen teuren Quadrocopter, um rasende Flüge aus der First-Person-Sicht zu überstehen. Die Mambo FPV von Parrot bringt Highspeed zum günstigen Preis.
0 notes
Text
Woran arbeite ich diese Woche?
Ich kann euch diese Woche leider nichts zeigen, da ich viel Theorie lerne. Was sind Widerstände? Wie benutze ich sie richtig? Wieso ist meine verdammte Lampe kaputt gegangen, als ich den Widerstand falsch eingesetzt habe! Wie liest man den Farbcode auf einem Widerstand?
Wofür ist ein Ultraschallsensor gut und wieso sind die Augen eines Roboters seine Ohren? Kann ich vielleicht eine Tiefenkamera in den Roboter mit einbauen? Was sind so die Bestandteile eines Roboters? Wie bekommt er Strom?
Wie baue ich vernünftige Schaltkreise? Was ist eine Anode, was eine Kathode? Strom fließt nur in eine Richtung...
Roboter mit Beinen brauchen Servomotoren. Was sind denn bitte Servomotoren?? Ist das nicht ein Teil eines Autos? ich möchte doch kein Auto bauen!
Außerdem habe ich noch gelesen, dass ich mich mit dem Thema IK - Invers Kinematics - auseinandersetzen muss. Ein hoch auf die Bib! Es gibt 2 Arten von Robotern mit Beinen, Quadrupods, also welche mit 4 Beinen und die mit mehr Beinen. Da mehr Beine auch immer gleich teurer sind, mache ich einen Quadrupod. Nachteil: Auf drei Beinen steht ein Stuhl schlecht. Die Lösung ist IK, das ist allerdings hohe Mathematik. Dazu später mehr, damit setze ich mich auseinander, wenn ich die Anfänger-Elektroniker-Probleme gelöst habe wie zum Beispiel “Wie schließt man einen Schaltkreis, was ist ein Ground”
Beine... 3 Möglichkeiten: Selbst bauen aus Holz, mittels 3 D Drucker und Maya (o.ä. Programm) drucken, Grundgestell kaufen, da Beine Selbstbauen bei den Profis, dessen Erfahrungsberichte ich im Internet gelesen habe gut und gerne mal 8 Monate benötigt. Ich muss den Roboter ja auch noch programmieren, das wird ja auch noch dauern...
0 notes
Link
0 notes
Text
Hindernisläufer - 3-Rad Roboter mit Ultraschallsensor, L298N Motor Treiber und Arduino Steuerung Teil 2
Test des HC-SR04 Ultraschallseonsors und Funktionstest des Servomotors SG 90
Nach den ersten, zufriedenstellenden Ergebnissen wird in diesem Beitrag über den Test des Ultraschallsensors und des Servomotors berichtet. Den Teil 1 dieser Serie gibt es hier: Teil 1.
Angeschlossen werden die beiden Bauteile nach folgendem Plan:
<!--td {border: 1px solid #ccc;}br {mso-data-placement:same-cell;}
Servomotor SG 90Arduino BraunGround Rot5 Volt GelbPin 10 Ultraschallsensor VCC Rot5 Volt Trigger WeißPin A1 Echo GrünPin A2 GND SchwarzGND
Diese Belegung entspricht dem Arduino Code, den ich für dieses Projekt verwende. Im ersten Teil habe ich schon den Link zur Youtube und Webseite von Mert angegeben. Hier ist er aber noch einmal. Ich empfehle, dieses Video genau anzuschauen und zu studieren. Da gibt es viele Hinweise und Lösungen für Projekte diser Art. Auch die weiteren Videos auf diesem Kanal sind hervorragend gemacht.
Im 3. Teil der Beitragsserie zeige ich dann meine Lösung zum mechanischen Aufbau aller Bauteile auf der Grundplatine und wohl auch den fertigen Roboter. Sollte es da noch zu Problemen kommen, steht eventuell noch ein weiterer Beitrag an.
Im folgenden Video zeige ich nun den Zusammenbau und den Test der Bauteile.
youtube
Summary: In the second part of this report I connect the sensor and stepper motor with the Arduino and test the functions.
0 notes