
Nous allons réaliser un robot possédant 3 roues capable d'effectuer 16 déplacements différents mais aussi capable de se déplacer dans un labyrinthe à l'aide de capteurs. GIORDANO Christophe ZIGNANI Yohan
Don't wanna be here? Send us removal request.
Statistics
We looked inside some of the posts by robot-3-roues-zignani-giordano and here's what we found interesting.
Average Info
Notes Per Post
6
Likes Per Post
6
Reblog Per Post
0
Reply Per Post
0
Time Between Posts
6 days ago
Number of Posts By Type
Text
17
Last Seen Tumblr Blogs





Fun Fact
Kazakhstan’s Minister of Communications and Informatics has blocked the Tumblr site because it contained 60 sites of terrorism, extremism, and pornography in 2015.
Text
Séance 24 du 16 Mars 2022
Dernière séance, on en a profité pour corriger et affiner le blog, mettre en place une idée pour la vidéo qui sera tourné le 18 Mars 2022 à Vernègues.
On a également finalisé le rapport ainsi que le diaporama pour la soutenance du 24 Mars 2022 .
0 notes
Text
Séance 23 du 9 Mars 2022
Absent lors de cette séance pour cause de COVID.
De plus, nous n’avons pas continué d’améliorer le robot par manque de temps à la maison.
Il ne reste plus qu’une séance avant la soutenance qui aura lieu le 24 Mars 2022. Lors de la dernière séance nous allons surement finir le rapport de projet, améliorer le poster et mettre en place un scénario pour la vidéo explicative du projet. Tout doit être rendu le jour de la soutenance.
0 notes
Text
Séance 21 et 22 du 2 Mars 2022
Cette journée nous avons accueillis à l’IUT à l’occasion des JPO 2022 des personnes souhaitant visiter et en apprendre plus sur le fonctionnement à l’IUT et sur ce qui était fait.
Nous avons donc fait une présentation des projets mais n’avons pas fait grand chose au niveau de l’avancement.
0 notes
Text
Séance 20 du 25 Février 2022
Lors de cette séance, nous avons divisé le travail en 2.
Yohan s’est occupé de trouver une solution pour contrôler le robot à distance en essayant plusieurs composants permettant de transmettre et de recevoir des informations mais sans succès.
Pour ma part, j’ai essayé d’améliorer le programme qui permet au robot de parcourir le labyrinthe. L’amélioration consiste à ne plus le faire avancer de 40cm mais de le faire avancer tant qu’il n’y a pas de mur.
Cela permettrait de réduire les erreurs de distances et donc d'être plus précis dans les déplacements.
Cependant il y a un problème, en effet lorsque le robot arrive à une intersection, la logique voudrait qu’il prenne à gauche or il ne s’arrête que s’il y a un mur devant.
Pour cela j’ai ajouté un second capteur sur le coté gauche qui va capter une différence de distance lors d’une intersection ce qui va signalez au robot qu’il peut aller à gauche et donc de le faire prendre à gauche. Le programme nécessite encore quelques réglages et je ne sais pas si cela sera fait attends.
Cela peut toujours être repris par d’autres groupe dans le futur et de continuer sur notre lancé.
0 notes
Text
Séance 19 du 9 Février 2022
Aucun succès pour la télécommande la capteur Infra-rouge. mais on a trouvé d’où venait le problème. C’est donc bien au niveau du code que cela coince.
En effet lorsque nous ajoutons la ligne de code qui permet d’initialiser le capteur, les 2 roues ne fonctionne plus, or si cette ligne est en commentaire alors cela fonctionne.
Nous avons donc trouver le problème mais impossible de savoir pourquoi et comment le résoudre on va donc se pencher sur d’autres façon de communiquer à distance.
0 notes
Text
Séance 18 du 7 Février 2022
Toujours rien pour la télécommande et le capteur Infra-rouge, après de nombreux tests différents, seulement la roue 3 fonctionne, on ne trouve pas le problème qu’il y a avec les roues 1 et 2 sachant que nous avons bien fait attention à ne pas prendre les mêmes ports pour les roues et les composants utilisés.
De plus, le programme dans lequel le robot réalise la chorégraphie de ses mouvements et donc où il utilise ses 3 roues fonctionne très bien, le problème ne vient donc pas des roues.
Nous allons continuer à chercher...
0 notes
Text
Séance 17 du 2 Février 2022
Lors de cette séance nous avons continué à essayer de passer d’un mode à l’autre grâce à la télécommande.
Pour cela nous avons fait un programme test qui lorsque que l’on appui sur le bouton 0 de la télécommande le robot doit tourner sur lui même et si l’on appui sur le bouton 1, le robot doit être à l’arrêt.
Or lorsque l’on appui sur le bouton 0, seulement la roue 3 tourne.
On a donc utilisé un écran LCD pour afficher “mode 0″ à la suite des mouvements afin de voir si suite à l’appui du bouton 0, on allait bien dans le mode 0 ce qui a été le cas.
On ne comprend donc pas pourquoi seulement une roue se met en rotation.
On essayera donc pour la prochaine séance et même hors séance de trouver la solution au problème.
1 note
·
View note
Text
Séance 16 du 27 Janvier 2022
Résumé de la séance :
1) Assemblage des codes
2) Test de la télécommande
1)
Le mode chorégraphie et le mode labyrinthe étant fini nous les avons regroupés en un même programme. Le bouton switch nous permet alors comme prévu de passer d’un mode à l’autre.
2)
Pour pouvoir remplacer le bouton switch on a donc repris la télécommande et un capteur IR que nous avions tester en début d’année. Cette fois-ci cela a fonctionné. Selon le bouton appuyé, un écran LCD affiche le nom du bouton (exemple pour le bouton rouge “power”) :

Le principe est le suivant : lorsque l’on appui sur un bouton, un code est envoyé est reçu par le capteur. Nous avons identifié chaque codes de chaque boutons et à l’aide d’un switch case, on affiche le nom du bouton correspond au code reçu.
Voici un autre exemple pour le bouton 2 :

Lors de la prochaine séance on remplacera donc dans le code le if du bouton switch par le if de la télécommande, si par exemple on appui sur le bouton 1 alors on fait le mode chorégraphie si c’est le bouton 2 alors le mode labyrinthe et ainsi de suite.
0 notes
Text
Séance 15 du 12 Janvier 2022
Résumé de la séance :
Lors de cette séance nous nous sommes consacré à l’étude du labyrinthe que le robot doit réaliser.
Après quelques modifications du programme le robot est désormais capable d’identifier lorsqu’il y a une impasse ou non peu importe le cas de figure rencontrés.
Voici une première vidéo ou le robot effectue un premier passage dans le labyrinthe afin de l’étudier :
https://drive.google.com/file/d/1mcogRd7L04sB9ETKLiGMboghqkxixXAb/view?usp=sharing
Et enfin voici une deuxième vidéo ou le robot prend le chemin le plus court :
https://drive.google.com/file/d/1mVDEAWgIDUxrOd0YZaVy2vpNYoIBvrUN/view?usp=sharing
On peut voir dans les 2 vidéos qu’a plusieurs reprises nous avons remis le robot en place cela est due à la batterie qui était déchargée.
Les 3 tâches du cahier des charges étant réussites, nous allons désormais nous consacrer aux amélioration comme l’ajout de la télécommande pour remplacer le bouton switch qui avait été tenté dans les premières séances.
0 notes
Text
Séance 14 du 11 Janvier 2022
Résumé de la séance :
1) Test du mode labyrinthe amélioré.
2) Soutenance oral.
1)
Lorsque nous avons expliqué comment nous avions réalisé le mode labyrinthe, nous nous sommes rendu compte que de nombreuses lignes n’était pas nécessaire et que le programme pouvait alors être améliorer, c’est ce qu’on a fait.
Une fois en cours le robot a alors suivi le labyrinthe comme il faisait avant et même de manière plus rapide.
2)
On a ensuite passer notre soutenance oral dans laquelle nous avons exposé notre projet à nos professeurs.
Pour la prochaine séance on espère finir le programme ou le robot étudie le labyrinthe.
0 notes
Text
Séance 13 du 5 Janvier 2022
Résumé de la séance :
1) Test du dernier mode
2) Avancement sur le rapport
1)
Nous avons modifié notre programme dans l’espoir que notre robot réussisse à l’étudier pour ensuite prendre le chemin le plus court et c’est ce qu’il a fait ça a marché !!!
Malheureusement on s’est ensuite aperçus que cela ne marcher pas pour tous les cas de figures, il y a donc encore quelques réglages à faire mais nous sommes sur la bonne voie, on l’espère.
2)
On a en parallèle avancé sur le rapport du projet ainsi que sur la soutenance oral qui aura lieu le Mardi 11 Janvier 2022.
Pour la prochaine séance, il est donc question de finir le rapport ainsi que de bien préparer notre soutenance mais aussi de réfléchir à comment résoudre les problèmes liés à l’étude du labyrinthe.
0 notes
Text
Séance 12 du 3 Janvier 2022
Résumé de la séance :
1) Fixation du Capteur US au robot
2) Test mode labyrinthe
3) Test parcours du labyrinthe le plus court
1)
Avant les vacances nous avions réalisé un support permettant au capteur de tenir sur le robot, enfin reçu nous avons pu le fixer au servomoteur pour ensuite poser le capteur dessus.
On a eu un peu de mal car les dimensions n’était pas parfaite mais cela à fini par tenir, voici à quoi cela ressemble :


2)
Pendant les vacances nous avons beaucoup avancé sur l’étude du labyrinthe pour qu’il puisse parcourir une deuxième fois le labyrinthe. On a fait un labyrinthe maison pour pouvoir le tester et cela a fonctionné, voici une première vidéo où le robot parcours le labyrinthe une première fois (bien sur c’est un petit labyrinthe avec une seule impasse car manque de place et de “mur”) :
https://drive.google.com/file/d/1aIcUsVhiqbfQ1_wOxNyvGsewLgHF-80N/view?usp=sharing
Le voici maintenant dans le vrai labyrinthe :
https://drive.google.com/file/d/1Htt3nhuWyjStPPNhcYFwvEXWHR-YHQa2/view?usp=sharing
C’est une réussite, notre robot est enfin capable de s’aventurer seul dans le labyrinthe est dans sortir indemne.
3)
On a donc voulu tester le mode ou il doit emprunter le chemin le plus court mais cela n’a pas marché sauf pour la première impasse.
https://drive.google.com/file/d/1ygGjMKQMcf2waxe3QBzKjgYGKK5JEClL/view?usp=sharing
Encore quelques réglages et on devrait être bon, a voir pour la prochaine séance.
0 notes
Text
Séance 11 du 16 Décembre 2021
Résumé de la séance :
1) Tests finaux du programme labyrinthe
2) Réalisation d’un support pour le capteur
3) Réflexion sur l’étude du labyrinthe
1)
Afin de finaliser notre programme, il fallait connaître le temps que le robot mettait à faire 40 cm dans les 3 directions possibles (gauche, devant et droite).
Pour cela, on a pris un repère à 40 cm du robot et on a visualisé s’il s’arrêtait bien au repère. On a ensuite mis les valeurs dans le programme.
Voici une vidéo du test dans le labyrinthe :
https://drive.google.com/file/d/1OIELDUB5cXtBWSVLMs8ReCPc_UACl0ah/view?usp=sharing
Comme on peut le voir dans le vidéo, le capteur est fixé à l’aide d’un serflex mais c’est plutôt bancale, c’est pourquoi on a réfléchi à un support.
2)
Pour que le capteur puise tenir sur le servomoteur sans difficultés, on a réalisé à l’aide de SolidWorks comme pour la coque du robot, une pièce qui permettra au capteur d’avoir une meilleur stabilité et donc d’avoir une meilleur efficacité sur l’aventure dans le labyrinthe.
Le robot pouvant maintenant explorer le labyrinthe de manière autonome il faut qu’il puisse alors l’étudier afin de pouvoir le parcourir une seconde fois sans erreur.
3)
On arrive donc à la réflexion sur comment le robot peut enregistrer le chemin le plus court.
C’est plutôt complexe mais possible. Il faut par exemple que le robot ne retourne pas dans un cul de sac qu’il aurai rencontré précédemment et donc effacer de sa “mémoire” certains mouvements.
Il y a en fait 6 combinaisons de 3 mouvements possibles.
Exemple d’une combinaison :

Ici le robot arrive à une intersection il va donc tourner à gauche car il suit toujours le mur de gauche (traie bleu), il va ensuite revenir car il y a une impasse pour ensuite tourner à gauche. Cela revient au final à aller tout droit lorsqu’il arrive à l’intersection (chemin rouge).
On va alors dire que :
Tourner à gauche, faire demi-tour puis retourner à gauche = aller tout droit.
Et comme celle-ci il y a 5 autres combinaisons.
Les mouvements seront ensuite stockés dans un tableau.
C’est maintenant les vacances, on a pu prendre le robot avec nous en espérant avancer sur la programmation de l’étude du labyrinthe et aussi préparer la soutenance qu’il y aura 1 semaine après les vacances.
Bonnes fêtes de fin années !!!
0 notes
Text
Séance 10 du 13 Décembre 2021
Résumé de la séance :
1) Assemblage de la coque
2) Tests et amélioration du programme labyrinthe
1)
Un ami nous a imprimé la coque pour notre robot, elle permet dans un premier temps de cacher les fils et les cartes afin de rendre plus propre notre robot. Elle permet également de fixer le bouton on/off et le bouton switch à l’arrière du robot ainsi que de fixer le servomoteur au dessus de la coque sur lequel est fixé le capteur US. Les dimensions de la coque avaient bien été réalisé ce qui nous a facilité la tâche, ayant reçu une nouvelle batterie nous l’avons câblé comme la précédentes mais cette fois-ci en la fixant à la structure à l’aide d’un serflex. Il ne manque plus qu’un support pour le capteur car sinon il ne peut pas tenir sur le servomoteur. On a ensuite testé le programme labyrinthe en tenant le capteur à la main.
Arrière du robot, le numéro 95 en référence à flash Mc Queen :

Face avant du robot :
https://drive.google.com/file/d/1IgJpG1Y0MI0VGtbR1IBlzHn8yunkGL5Z/view?usp=sharing
On peut voir sur le dessus l’emplacement du servomoteur.
2)
On a fait un petit test mais c’était plutôt compliqué car il fallait tenir le capteur, mais dans la globalité le programme fonctionne il faut juste changer le temps que le robot doit mettre pour réaliser les mouvements de directions (gauche, devant et droite).
A présent nous allons nous consacrer à la partie étude du labyrinthe. On a déjà réfléchie à une stratégie qui consiste à enregistrer les mouvements réalisés dans un tableau. A voir...
0 notes
Text
Séance 9 du 9 Décembre 2021
Résumé de la séance :
1) Soutenance oral
2) Test du programme labyrinthe
1)
Lors de cette séance, il était prévu une soutenance oral de 15 minutes, où l’on a présenté notre projet à nos professeurs en leur précisant le cahier des charges, les spécifications du robot, l’avancement de notre projet et ce qu’il nous restait à faire (1 minute était à faire en anglais soit 2 car nous sommes en binômes).
Bien sûr ce n’était pas parfait, il y a des modifications à faire et encore du travail pour être prêt pour la Soutenance de fin de semestre 3 qui se déroulera donc en Janvier 2022.
2)
Après la soutenance nous avons voulu tester le programme labyrinthe qui avait été réalisé à la maison. Nous avions pu le tester chez nous car nous avions notre propre capteur US (quasiment le même que celui utilisé en cours) et aussi un servomoteur (identique à celui utilisé en cours). Grâce à une carte ELEGOO UNO R3 qui fonctionne presque comme la carte ARDUINO UNO, d’un écran LCD 16*2 et d’une plaque labdec et de quelques fils on a alors pu simuler le robot dans le labyrinthe mais sans les moteurs et les roues, c’est pourquoi nous affichions sur l’écran LCD chaque mode du programme que le robot était censé réaliser : Mouvement à gauche/ droite/ devant, Tourner le capteur, Faire un tour sur lui même, Tourner de 90° etc...
Voici un exemple où l’on simule une impasse c’est à dire, un mur à gauche, devant et à droite, le robot est donc censé faire un tour sur lui même puis le capteur regarde devant pour effectuer le mouvement “devant” pour ensuite se repositionner à gauche car le capteur regarde toujours le coté gauche en premier :
https://drive.google.com/file/d/1E8Mto729hkqfbjlV5iidCmYJ-nB4PNCH/view?usp=sharing
Nous avons alors téléversé le programme sur la Carte Arduino UNO de notre robot et avons alimenté nos cartes à l’aide d’un générateur de tension (11,1 V) car toujours pas de batterie. N’ayant donc pas de batterie et n’ayant toujours pas la coque du robot qui va permettre de fixer les boutons, le servomoteur ainsi que le capteur, le test était plutôt gênant à réaliser car il y avait beaucoup d’encombrements. On n’a pas pu filmer le test, mais cela a fonctionné, on espère donc vite recevoir la batterie et la coque (en cours d’impression) pour plus de souplesse.
Voici une photo du labyrinthe que le robot doit parcourir :

Au prochain cours on fixera la coque ainsi que les boutons capteur etc... Si on a une batterie, on retestera le code pour l’améliorer s’il y a des imperfections. Et s’il nous reste du temps on commencera la partie où le robot doit étudier le labyrinthe pour le reparcourir sans se tromper.
1 note
·
View note
Text
Séance 8 du 2 Décembre 2021
Résumé de la séance :
1) Code du nouveau programme
2) Mesure des temps de déplacement
1)
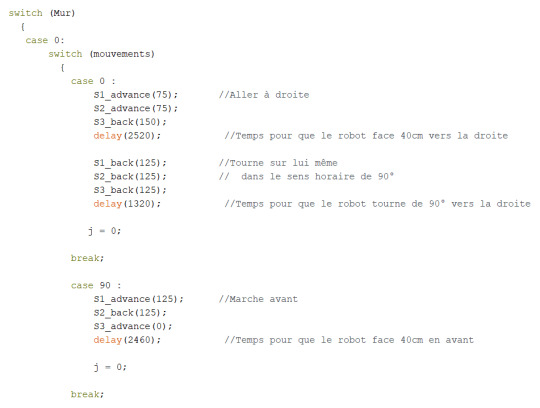
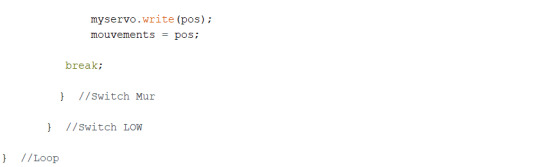
Dans un premier temps, nous avons codé le nouveau programme qui consiste à faire avancer le robot de 40 cm et agir ensuite selon les murs.
Méthode:
Il avance de 40 cm, puis il regarde à gauche. S’il y a un mur alors le capteur tourne à droite pour voir devant, s’il y a de nouveau un mur alors il tourne encore à droite pour voir a droite, puis la même chose s’il y a encore un mur alors il fait demi-tour et avance de 40 cm puis le cycle recommence.
2)
Ensuite il a fallu calculer le temps que le robot met pour avancer/ aller à droite/ aller à gauche de 40 cm et aussi tourner de 90° ou tourner de 180°.
Pour cela, on a calculé avec un chronomètre combien de temps il mettait à peu près pou faire 40 cm en avant (par exemple) puis on a ajusté la valeur pour qu’il s’arrête vraiment à 40 cm.
Voici un exemple ou l’on fait le test pour qu’il tourne de 90° :
https://drive.google.com/file/d/1Gok96Oz0gYtDuTQ3wWjrBPQe-9n7WYBT/view?usp=sharing
Et enfin voici le programme labyrinthe :


Pour notre prochaine séance nous testeront le code si bien sûr nous avons une nouvelle batterie.
De plus Yohan à réalisé sur SolidWorks une coque pour le robot qui permettra de fixer les bouton switchs et on/off ainsi que le servomoteur et pour cacher les fils. La coque devrait être imprimée lundi 6 Décembre.
En attendant, je vais essayé de tester le code chez moi grâce à un écran LCD 16*2 et on va également préparer notre soutenance du Jeudi 9 Décembre.
2 notes
·
View notes
Text
Séance 7 du 30 Novembre 2021
Lors de cette séance, nous avons continué à réfléchir sur le fonctionnement de notre mode labyrinthe.
En effet, il nous manque certains éléments comme la vitesse des roues en cm/s ou encore comment fixer le capteur sur le servomoteur.
Après analyse du code et après avoir discuter avec certains de nos camarades on a décidé de changer notre méthodologie qui consistait à calculer le temps qu’il fallait pour atteindre le prochain mur (bien trop complexe et trop de contraintes).
Notre nouveau programme consistera à faire avancer le robot de 40 cm (dimension d’un carreau du labyrinthe) et d’observer ensuite s’il y a un mur sur le coté gauche (on garde la logique de toujours suivre le mur de gauche), sinon devant sinon à droite, si rien alors demi-tour.
Pour notre prochaine séance nous commenceront le nouveau programme.
2 notes
·
View notes